
ID : 10652
フォークリフトによるロボット持ち上げ (フォークユニット)
| 吊り上げ装置 | 積荷に対して持ち上げるのに十分な能力を有するフォークリフト |
|---|---|
| 使用機材・器具 |
|
運搬前は下記事項にご注意ください。
- 各軸を適切な運搬姿勢の角度に移動してください。
運搬時は下記事項にご注意ください。
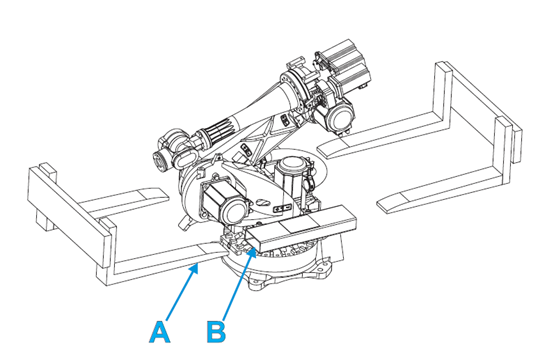
- フォークAの中心間の距離は約765mmになるように調整してください。
- フォークAの端がアタッチメントBの反対側から出ていることを確認してください。
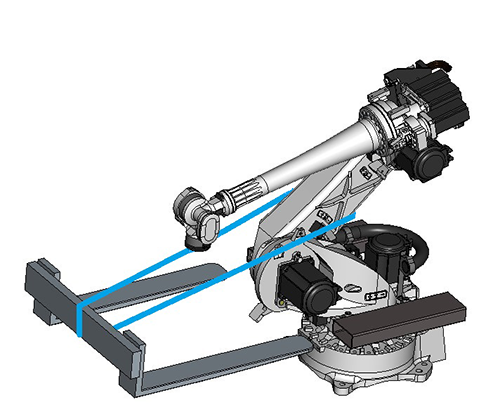
- 慎重にロボットを持ち上げ、設置場所近くに移動してください。
- ロボットに過度な振動や衝撃が加わらないようにしてください。また、ロボットの転倒を防止するためにロープ等で下図のように固定してください。
フォークリフト用アタッチメント
構成品
- フォークリフト用アタッチメント (個数 : 2)
- 六角穴付きボルト M20 × 40mm ねじ強度区分12.9 (個数 : 4)
取り付け手順
1
ロボットを床に置いた状態にします。
2
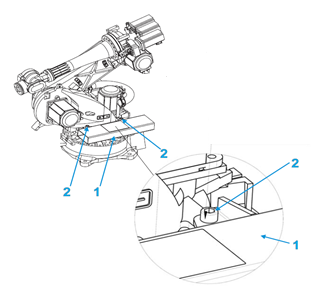
フォークリフト用アタッチメントをロボットベース部分に取付けます。
3
固定ボルトを2本、下記の締め付けトルクで締め付けます。
六角穴付きボルト (計2本) |
M20 × 40 |
|---|---|
| 締付けトルク | 674Nm |
4
反対側にも同様にアタッチメントを取付けます。
以上で、フォークリフト用アタッチメントの取り付けは完了です。
ID : 10652