全文検索
コマンド検索
マニュアルを選択してください
本書の見方と操作方法
コマンドリファレンス
ロボット動作作成の基本
スマートTP操作ガイド
ミニペンダント操作ガイド
WINCAPSIIIガイド
エラーリスト
パラメータリスト
各機能の詳細説明
VMBシリーズロボットの製品情報
VMBシリーズロボットのセットアップ
VMBシリーズロボットのメンテナンス
安全上のご注意
VLAシリーズロボットのメンテナンス
VLAシリーズロボットの製品情報
VLAシリーズロボットのセットアップ
MC9シリーズの製品情報
MC9シリーズのメンテナンス
MC9シリーズのセットアップ
IDジャンプ
AND
OR
文字サイズ
小
中
大
HOME
セットアップ
VLAシリーズロボットのセットアップ
据付け、接続手順
ロボット本体
ロボット本体の運搬方法
フォークリフトによるロボット持ち上げ (パレット)
<< 前へ
次へ >>
安全上のご注意
製品情報
セットアップ
ロボット動作作成
メンテナンス
付録
ID : 10651
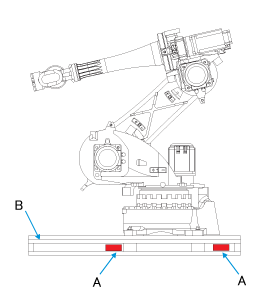
フォークリフトによるロボット持ち上げ (パレット)
持ち上げ装置
積荷に対して持ち上げるのに十分な能力を有するフォークリフト
使用機材
フォークリフト フォークの長さ 約 1000mm
運搬前は下記事項にご注意ください。
各軸を適切な運搬姿勢の角度に移動してください。
運搬時は下記事項にご注意ください。
フォークAの中心間の距離は約780mmになるように調整してください。
フォークAの端がパレットBの反対側から出ていることを確認してください。
慎重にロボットを持ち上げ、設置場所近くに移動してください。
ID : 10651
<< 前へ
次へ >>
ページトップへ
 HOME
HOME