
ID : 10638
ロボット本体の固定方法
ここでは、以下の項目について説明しています。
固定方法
ロボットを床に直接固定することは想定していませんので、ロボット取付け面とコンクリート面の間に架台やロボット固定用プレートを設置する必要があります。
ロボットを固定するためのねじ穴の寸法
下図は、ロボットのベース部分を上から見たときの各穴の位置を示したものです。
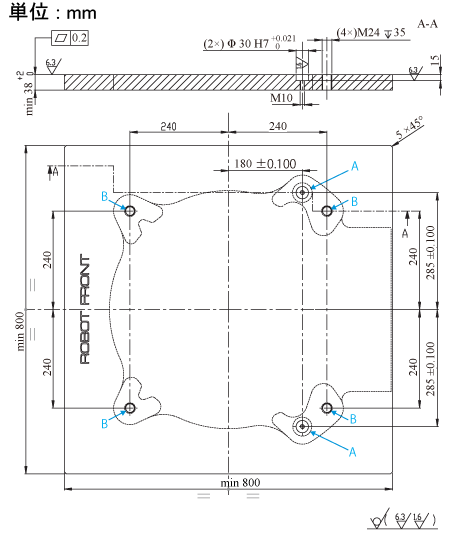
A : 位置決めピン用の穴
B : ロボット固定ボルト用の穴
ロボット固定ボルトと位置決めピン
ロボットを固定するには、位置決めピン、固定ボルトを使用します。
ロボットに同梱されています、ロボット固定用ボルトと位置決めピンが使用できます。
各ボルト・ピンの寸法および固定方法は下図のとおりです。
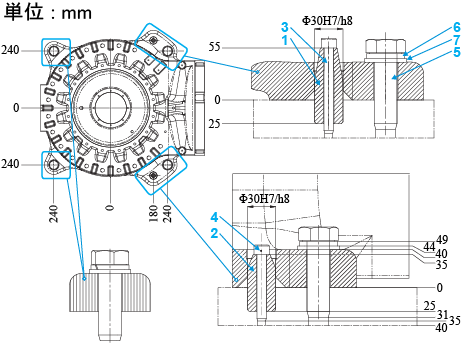
- 位置決めピン ø=30mm L=80mm (個数 : 1)
- 位置決めピン ø=30mm L=60mm (個数 : 1)
- 六角穴付きボルト M10x90mm (個数 : 1)
- 六角穴付きボルト M10x70mm (個数 : 1)
- 六角ボルト M24x80mm (個数 : 4)
- スプリングッシャ ø=24mm (個数 : 4)
- フラットワッシャ ø=24mm (個数 : 4)
固定手順
1
ロボットを置くプレートを清掃します。
2
位置決めピンを2本、プレートに配置して対応する固定ボルトを最大50Nmで締め付けます。
3
"ロボット本体の運搬方法" に記載されているように、ロボットを持ち上げます。
4
ロボットをプレートの上の位置決めピンを基準にして、配置します。正面側を適切な位置にして、ロボットを配置します。2本の位置決めピンを破損しないように、慎重に行います。
5
スプリングワッシャとフラットワッシャを配置し、固定ボルトを4本、締め付けトルク 690Nmで締め付けます。
斜面設置時の第1軸の動作範囲
ロボットを斜面(最大許容傾斜45°) に設置する場合、次の図に従って、1軸の動作範囲の制限を行う必要があります。
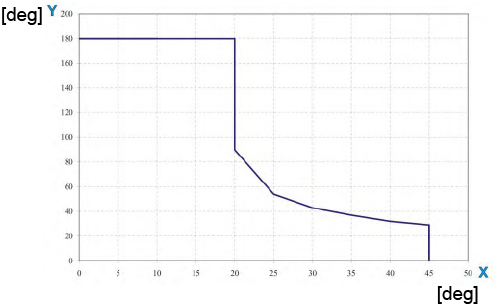
Y : ロボット固定面の傾斜角度 [°]
X : 1軸動作範囲 [°]
| 傾斜角度 | 動作範囲 |
|---|---|
| 20° | ±90° |
| 25° | ±54° |
| 30° | ±43° |
| 40° | ±32° |
| 45° | ±29° |
ID : 10638
- このページに関連する情報
- 床置き設置時の固定方法