
ID : 9888
原点復帰動作を開始する
原点復帰動作を実行する前に、指定した原点と記録した動作ログから原点復帰動作の軌道を生成します。軌道生成後に原点復帰動作を実行できます。
原点復帰動作は、必ず安全に停止できる速度まで設定を下げて利用してください。
軌道の生成および原点復帰動作の実行は、PacScriptの専用コマンドまたはスマートTPから実行できます。
専用コマンドで軌道を生成した場合は、専用コマンドから原点復帰動作を実行してください。同様にスマートTPで軌道を生成した場合は、スマートTPから原点復帰動作を実行してください。異なる方法で生成した軌道を使用して原点復帰動作を実行することはできません。
専用コマンドを使用する場合
専用コマンドは、自動モード時に使用できます。
専用コマンドを使用した場合、原点復帰動作の軌道の計算は1度のログ取得につき1回のみを行うことができます。
専用コマンドでの軌道計算後に他の原点への復帰を行いたい場合は、スマートTPをご利用ください。
CalcBackTraceLog
コマンド実行時に復帰したい原点を指定します。
指定した原点と記録した動作ログをもとに経路の計算を行い、原点復帰動作の軌道を生成するコマンドです。
コマンドの詳細は、コマンドリファレンスの "CalcBackTraceLog" を参照してください。
MoveBackTraceLog
生成した軌道でロボットを原点復帰動作させるコマンドです。
コマンド実行前に原点復帰動作の軌道を生成していない場合はエラーが発生します。
コマンドの詳細は、コマンドリファレンスの "MoveBackTraceLog" を参照してください。
スマートTPを使用する場合
スマートTPによる操作は、手動モード時または自動モード(プログラムチェックオプション選択)時に使用できます。
操作経路 : [F2 アーム] - [F7 原点復帰]またはショートカットメニューの[原点復帰]
1
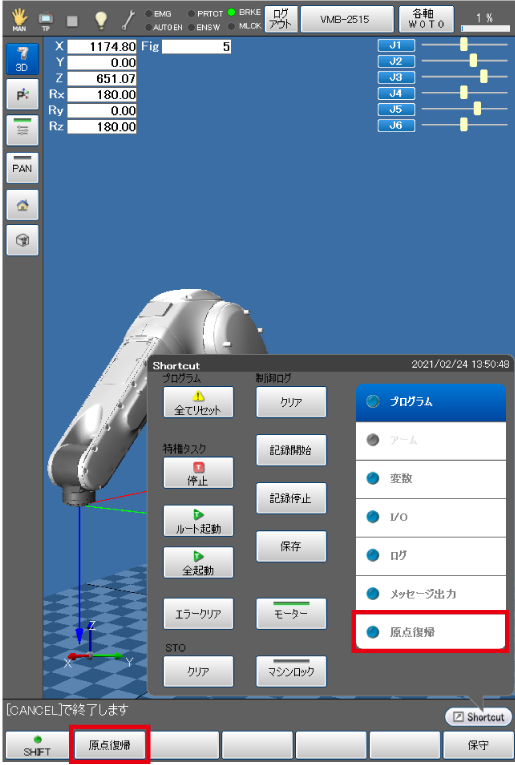
アーム画面で[F7 原点復帰]を押すか、ショートカットメニューの[原点復帰]を押します。
2
下記の選択肢より復帰位置を指定します。
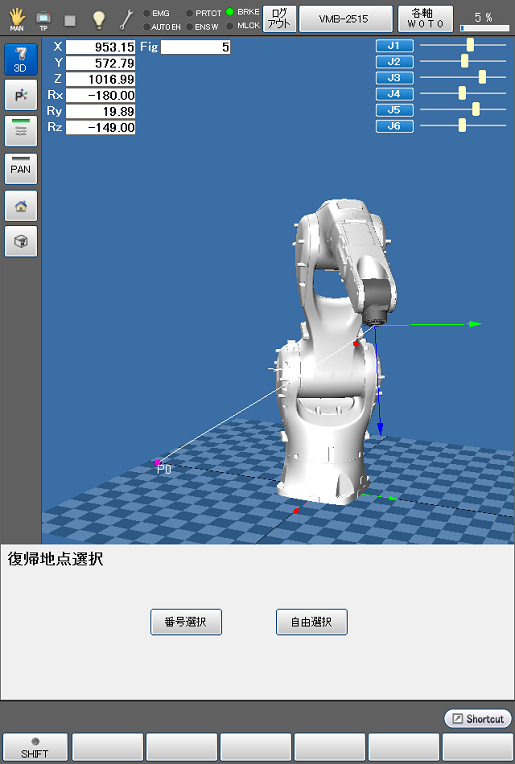
| 選択肢 | 内容 |
|---|---|
| 番号選択 | 原点番号から復帰位置を指定します。 -1: SetVirtualTracePosで最後に記録した原点 0は指定できません。 |
| 自由選択 | スライダを使用して復帰位置を指定します。 軌道上の水色の丸が復帰位置になります。 |
3
原点復帰動作の軌道を計算します。
記録したロボットの動作時間が長いほど、原点復帰動作の軌道の計算に時間がかかります。
原点復帰の動作ログの最終位置とロボットの現在位置が異なる場合は、原点復帰動作の軌道上の点の中から最短かつ、4~6軸の変位量が少ない点を開始点として軌道が生成されます。
4
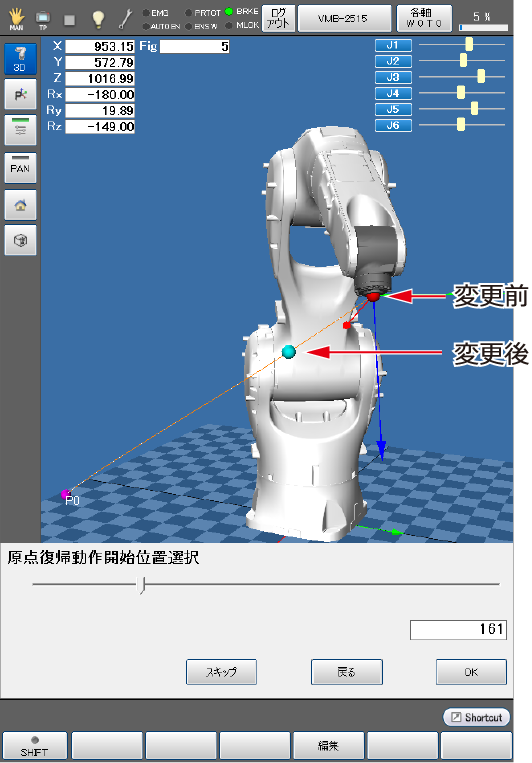
原点復帰動作の開始位置選択スライダが表示されます。スライダを使用して原点復帰動作の開始位置を変更できます。
軌道上の赤色の丸が、変更前の原点復帰動作の開始位置です。
水色の丸が、変更後の原点復帰動作の開始位置になります。
この設定はスキップが可能です。
原点復帰動作の開始位置を変更した場合、原点復帰動作を実行すると、ロボットは現在の停止位置から原点復帰動作の開始位置までPTP動作します。原点復帰動作の開始位置に到達した後、生成した軌道上を動作します。
ロボットの現在の停止位置から変更した原点復帰動作の開始位置までの軌道は、動作ログをもとに生成されていないので、周辺機器などへの干渉は保証されません。
5
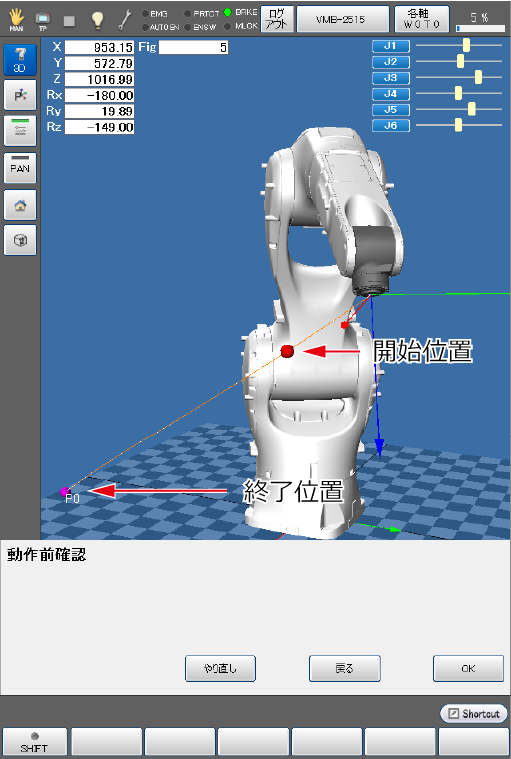
原点復帰動作実行前の確認です。
軌道上の赤色の丸が、原点復帰動作の開始位置です。
ピンク色の丸が、原点復帰動作の終了位置になります。
6
イネーブルスイッチを正しく押しながら、[FWD]キーを押し続けると原点復帰動作が実行されます。
7
原点復帰動作が完了すると復帰地点選択画面に戻ります。
ID : 9888