
ID : 9643
ロボット初期設定
ロボットを運転するための基本的なパラメータであるロボットアーム先端の"負荷質量(ツールを使うときはそのツールと先端負荷の合計質量)"、"負荷重心"、およびこれらの負荷条件に対するロボットを最適な速度、加速度で制御するための "最適速度制御機能" を設定できます。
負荷質量、負荷重心、最適速度制御機能を設定する
ロボットの運転条件について、負荷質量(ツールとその先端の負荷の合計質量)およびその重心が把握できたら、下記の手順に従って、これらを設定します。
操作手順
一部のロボットでは簡単設定機能を使って設定できます。 詳細は "簡単設定(スマートTP)" を参照してください。
1
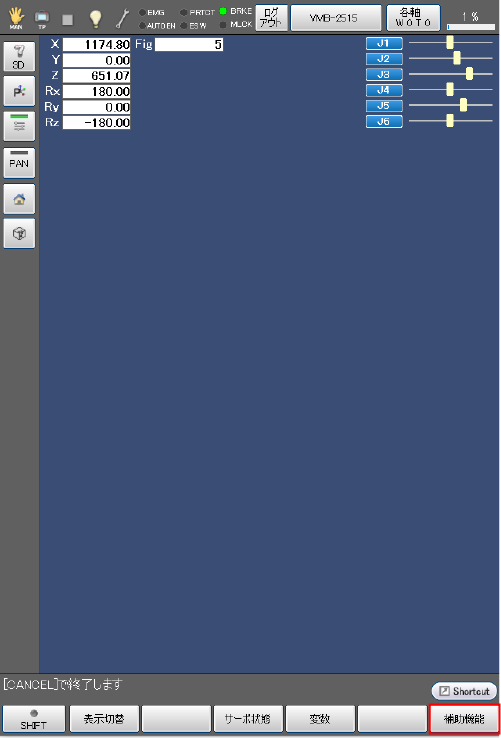
基本画面の[F2 アーム]を押します。

2
[F6 補助機能]を押します。
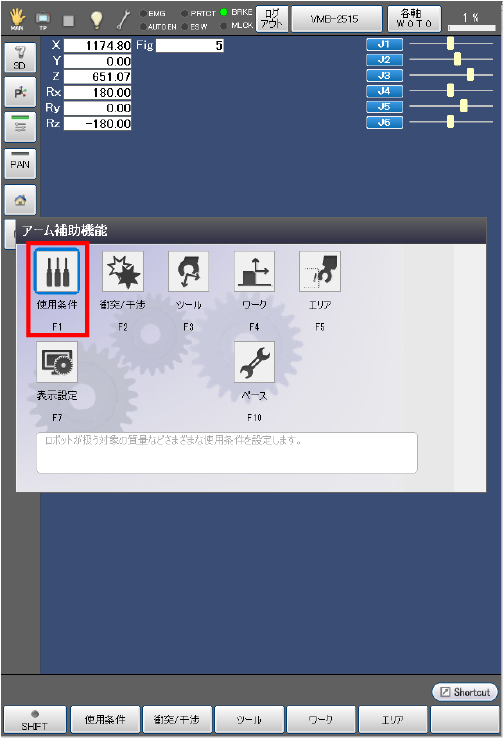
3
[F1 使用条件]を押します。
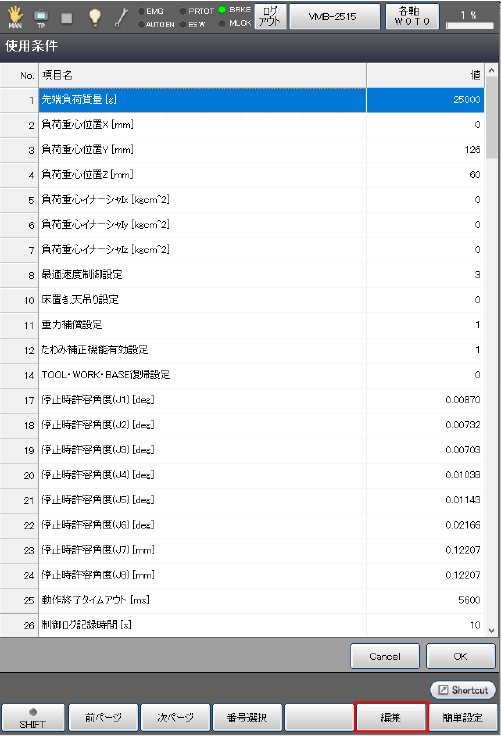
4
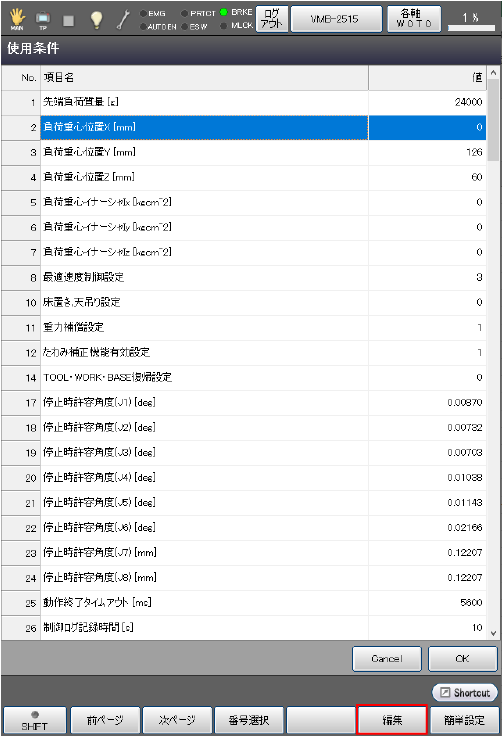
[1 : 先端負荷質量[g]]を選択します。選択された行が反転表示されます。
ここで、[F5 編集]を押します。
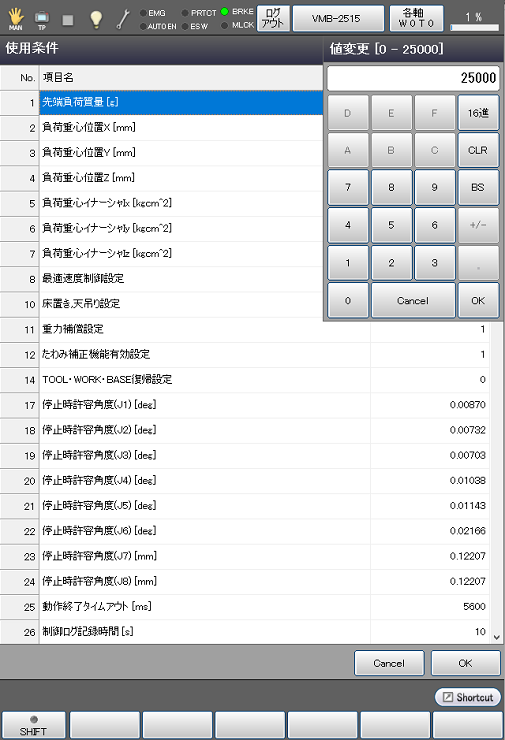
5
テンキーを使って、必要な数値を入力します。
入力した数値を取消すには、[CLR]または[BS]キーを押します。
入力した数値を確認し、よければ[OK]を押します。
このステップの操作そのものを取消し、元の設定に戻すには、[Cancel]を押します。
システムメッセージが表示されますので、よければ[OK]を押して確定します。
[Cancel]を押すと、設定は変更されません。

テンキーは消え、下に示すように、新規入力した数値により[1 : 先端負荷質量[g]]が更新されます。
[OK]を押すと、この値が確定します。取消すには[Cancel]を押します。画面は元に戻ります。

6
[2 : 負荷重心位置X[mm]]を押して選択します。
選択された行が反転表示されます。
ここで、[F5 編集]を押します。
7
テンキーを使って、必要な数値を入力します。
入力した数値を取消すには、[CLR]または[BS]キーを押します。
入力数値を確認し、よければ[OK]を押して確定します。
このステップの操作そのものを取消し元の設定に戻すには、[Cancel]を押します。

テンキーは消え、下に示すように、新規入力した数値により[2 : 負荷重心位置X(mm)]が更新されます。
[OK]を押すと、この値が確定します。取消すには[Cancel]を押します。画面は元に戻ります。

8
同様に[3 : 負荷重心位置Y[mm]]および[4 : 負荷重心位置Z[mm]]を設定します。
負荷重心イナーシャが分かる場合には、同様に設定します。
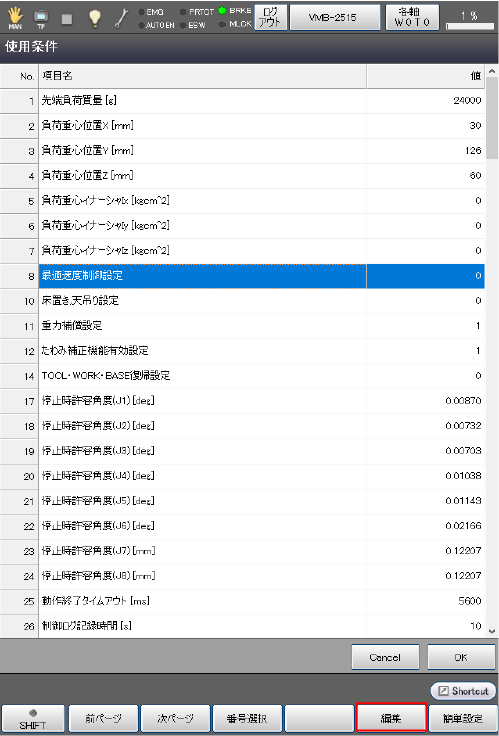
9
[8 : 最適速度制御設定]を押して選択します。
選択された行が反転表示されます。
ここで、[F5 編集]を押します。
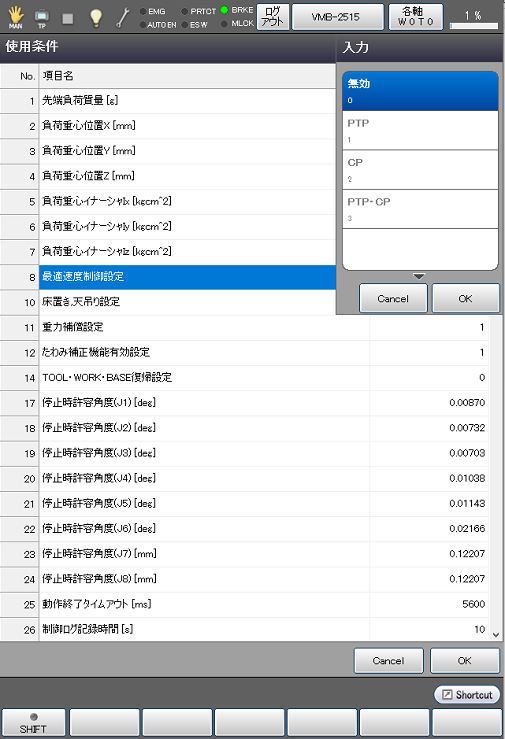
10
使用する項目を選択し、[OK]を押して確定します。
このステップの操作そのものを取消し、元の設定に戻すには、[Cancel]を押します。
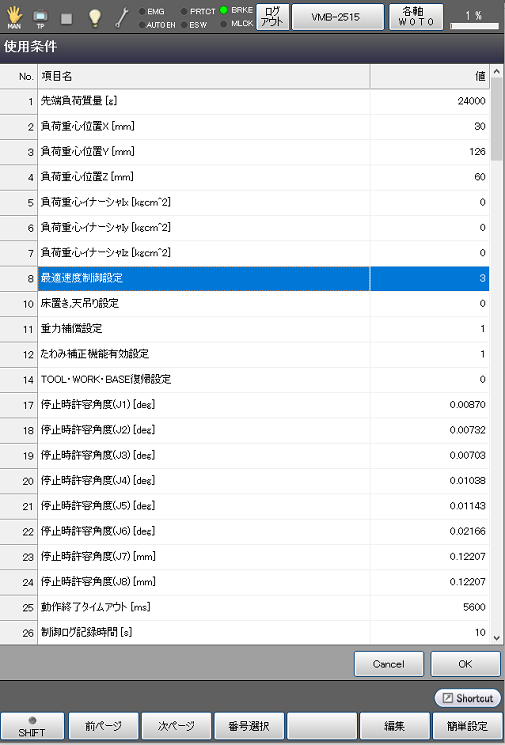
入力画面は消え、下に示すように、新規入力した数値により[8 : 最適速度制御設定]が更新されます。
[OK]を押すと、この値が確定します。取消すには[Cancel]を押します。画面は元に戻ります。
11
[使用条件]画面の[OK]ボタンを押します。
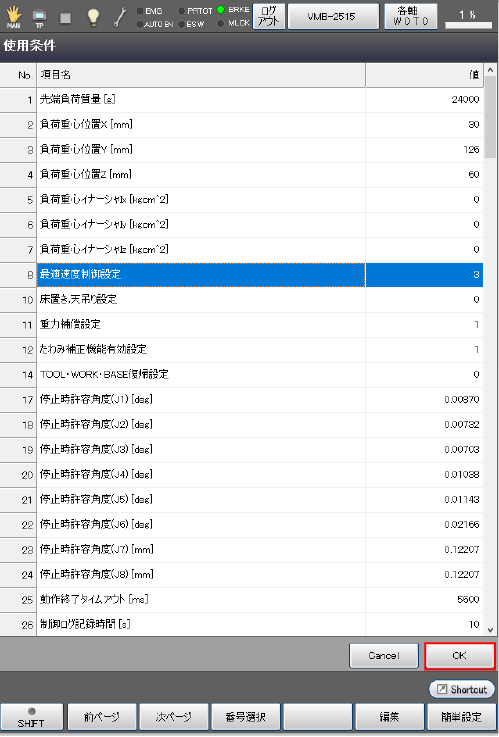
以上で設定は完了です。
ID : 9643