
ID : 7923
编程示例
以下是通过Command-Slave功能,控制机器人的编程的一个示例。
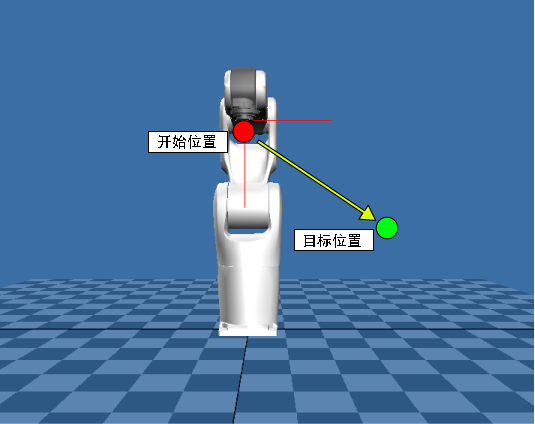
作为例子,创建一个程序,通过PTP控制移动到6轴机器人的绝对位置(从开始位置到目标位置)。
1
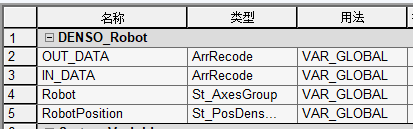
准备Command-Slave用变量。
在数组的结构体上,创建“eRC_AxesGroup”与“eRC_PosDensoRobot”型的变量。
请参照“数组的结构体和全局变量的创建”。
在这个例子中,通过数组声明各变量。请用户随意选择声明方法。
2
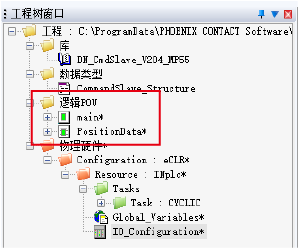
在“逻辑POU”文件夹中,创建程序类型的“(MAIN)主”和功能块类型的“(PositionData)位置数据”。
在这个例子中,用LD (Ladder Diagram)创建主,用ST(Structures Text)创建位置数据。请用户随意选择编程语言。
3
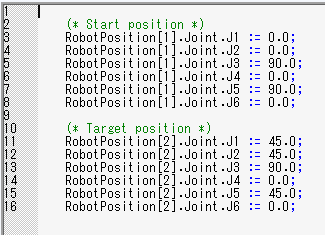
首先,编写位置数据程序。
声明起始位置与目标位置。
在这个例子中,将“RobotPosition[1]”声明为起始位置,将“RobotPosition[2]”声明为目标位置。
4
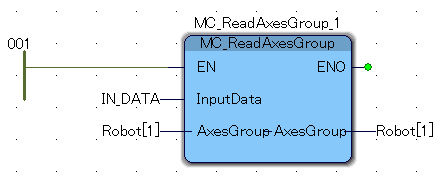
接着,编写主程序。
在程序的开头配置“MC_ReadAxesGroup”。
5
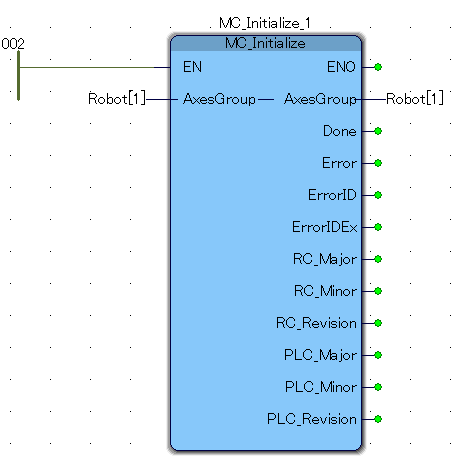
配置"MC_Initialize"。
6
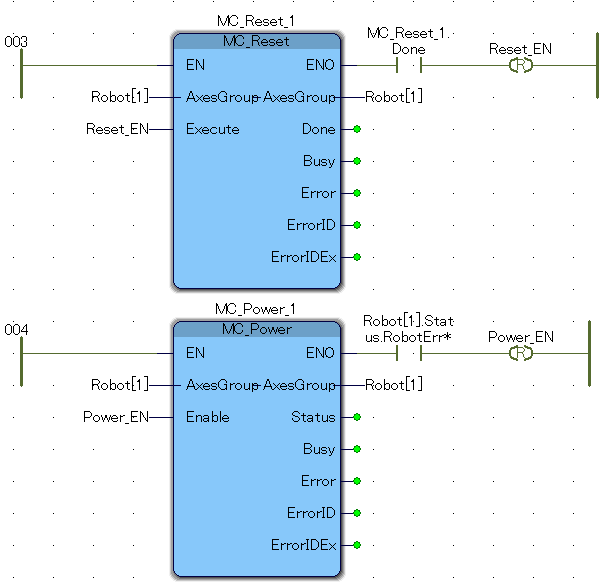
为了防备发生错误的情形,配置“MC_Reset”。
请为输入变量“Execute”分配任意的全局变量。
为了接通机器人的电机,在“MC_Reset”后配置“MC_Power”。
请为输入变量“Enable”分配任意的全局变量。
另外,如下图所示,编写“MC_Reset”完成时“MC_Reset”的输入变量“Execute”被复位的程序。
同样地,编写发生错误时“MC_Power”的输入变量“Enable”被复位的程序。
7
为了指定机器人的起始位置和目标位置,配置位置数据的FB。
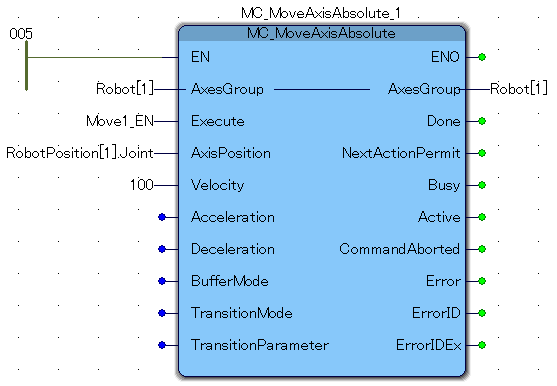
8
为了将机器人移动到开始位置,配置"MC_MoveAxisAbsolute"。
请为输入变量“Execute”分配任意的全局变量。
请为输入变量“AxisPosition”分配指定的起始位置。
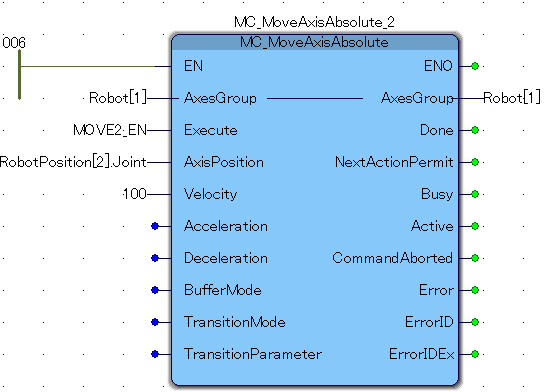
9
为了将机器人移动到目标位置,配置"MC_MoveAxisAbsolute"。
请为输入变量“Execute”分配任意的全局变量。
请为输入变量“AxisPosition”分配指定的目标位置。
10
在程序的最后配置"MC_WriteAxesGroup"。
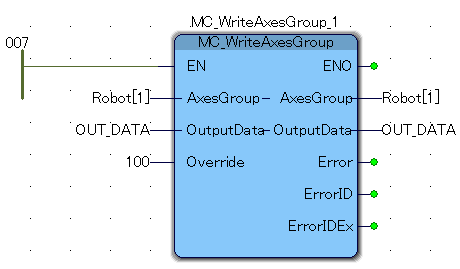
至此,程序创建完成。
ID : 7923