
ID : 7489
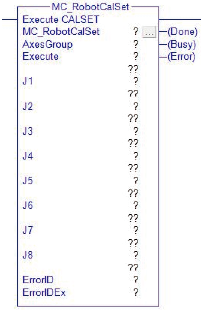
MC_RobotCalSet
执行机器人的CALSET。
| 图形显示 | AOI范畴 |
|---|---|
 |
非动作 |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 输入输出条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
输入变量
| 变量名 | 数据型 | 有效范围 |
|---|---|---|
| Execute | BOOL |
|
|
||
| J1 | BOOL |
|
|
||
| J2 | BOOL |
|
|
||
| J3 | BOOL |
|
|
||
| J4 | BOOL |
|
|
||
| J5 | BOOL |
|
|
||
| J6 | BOOL |
|
|
||
| J7 | BOOL |
|
|
||
| J8 | BOOL |
|
|
||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | INT |
|
|
| ErrorIDEx | DINT |
|
功能说明
- 关于CALSET
- 将控制器识别的位置信息和机器人本体的实际位置关系进行校正称作CALSET。CALSET中,各轴存在预先规定的可固定位置,创建该位置和编码器值相对应的数据(CALSET值)。此时,固定轴的位置称作CALSET位置,记录CALSET位置的度数的数据为RANG值。
- 每台机器人的CALSET数据都不相同。
- 更换电机或编码器的备份电池电量不足、编码器内的位置数据丢失时,需要进行CALSET作业。
注意事项
因编码器备份电池的寿命等问题发生错误或控制器电源OFF时机器人受到过大的冲击发生错误时,需要清零编码器并执行CALSET作业。
请在执行这个AOI前,执行AOI"MC_EncReset"。
ID : 7489