
ID : 6081
最佳速度控制功能
根据机器人手臂前端安装的工具、工件的质量和重心位置,最佳速度、加速度也有所不同。因此,根据机器人的前端负荷或姿势,设定工具、工件的质量和重心位置及模式。
详细内容请参照功能指南的“最佳速度控制功能”。另外,关于设定步骤,请参照“最佳速度控制功能的设定方法”。
前端负载质量为工具和工件的总质量,单位为g。
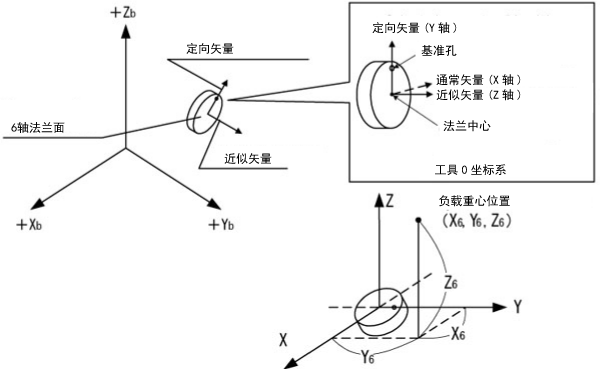
通过TOOL0坐标系表示负载重心位置。单位为mm。
6轴机器人时
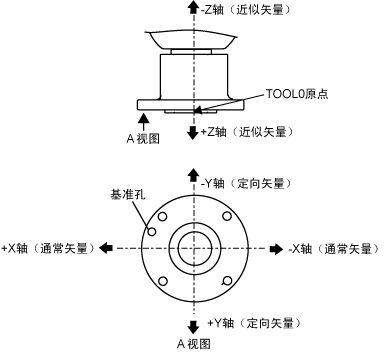
如下图所示定义6轴机器人的TOOL0坐标系。
TOOL0坐标系的原点为6轴法兰中心。
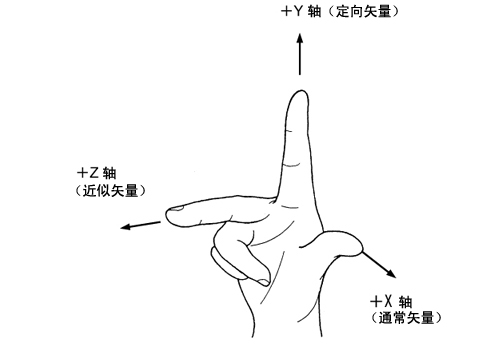
TOOL0坐标系的Y分量为从法兰中心到基准孔方向(定向矢量方向),Z分量为通过法兰中心的与法兰面垂直的方向(近似矢量方向),X分量为以定向矢量为Y轴、以近似矢量为Z轴时的右手坐标系中的X轴方向(通常矢量方向)。
另外,基准孔是指VM为φ6H7,其它为φ5H7的销钉孔。
右手坐标系
4轴机器人时
如下图所示定义4轴机器人的TOOL0坐标系。
TOOL0坐标系的原点为4轴法兰中心。
ID : 6081