
ID : 5665
通过输入数值进行视觉校准的步骤
通过输入3点的数值进行校准的实施步骤
按照以下步骤实施。
1
操作路径:基本画面 - [F8 视觉] - [F1 视觉校准]
打开视觉校准画面。
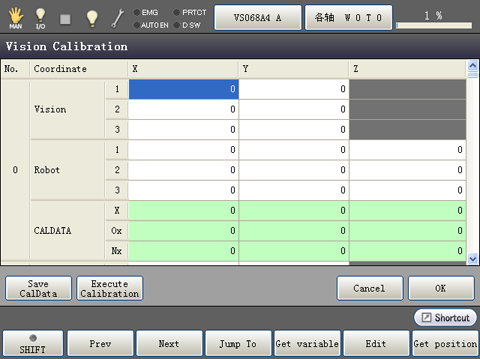
2
显示校准对象编号(0~31)的Cal数据表。
也可确认已输入的值。
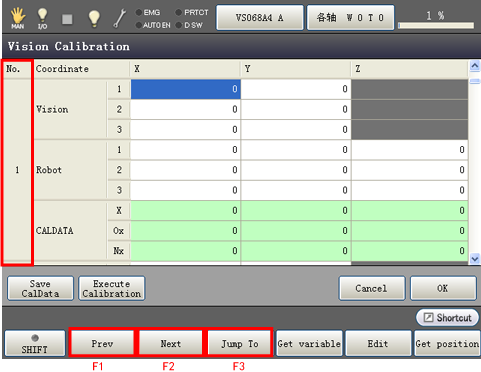
分为以下3个操作方法。
-
指定编号
按压[F3 选择编号]按钮,打开编号选择画面。输入编号,按压[OK]按钮后,显示所选编号的Cal数据表。 -
翻页
使用[F1 上一页]、[F2 下一页]按钮,显示相应编号的Cal数据表。 -
移动光标
使用箭头键或漫步旋钮移动光标,显示相应编号的Cal数据表。
3
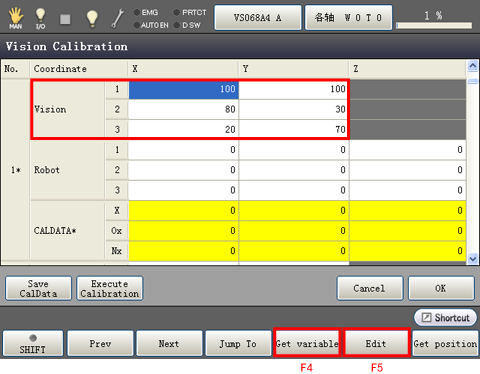
使用数值输入视觉的3点坐标(X,Y)。
分为以下2个输入方法。
-
输入数值
选择要输入的位置,按压[F5 编辑]按钮后,打开数值输入用画面。输入数值,按压[OK]按钮后,输入至所选位置。 -
指定变量
选择要输入的点X或Y,按压[F4 读入变量]按钮后,打开V变量编号的输入画面。输入编号并按压[OK]按钮后,将变量的X、Y值复制至要输入的点X、Y。
4
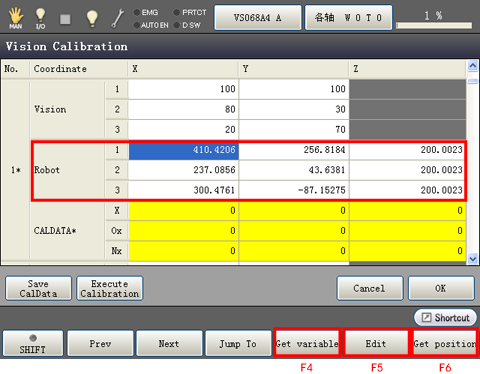
输入视觉各点所对应机器人的3点坐标(X,Y,Z)。
分为以下3个方法。
-
输入数值
选择要输入的位置,按压[F5 编辑]按钮后,打开数值输入用画面。输入数值,按压[OK]按钮后即可进行输入。 -
指定变量
选择要输入的点X、Y、Z中的任意一个,按压[F4 读入变量]按钮后,打开P变量编号的输入画面。输入编号并按压[OK]按钮后,将变量的X、Y、Z值复制至要输入的点X、Y、Z。 -
获取当前位置
选择要输入的点X、Y、Z中的任意一个,按压[F6 获取位置]按钮后,显示确认画面。按压[OK]按钮后,将机器人当前位置的值复制至要输入的点X、Y、Z。
5
按压[执行校准]按钮。
计算变换矩阵并在“CALDATA”栏中显示。
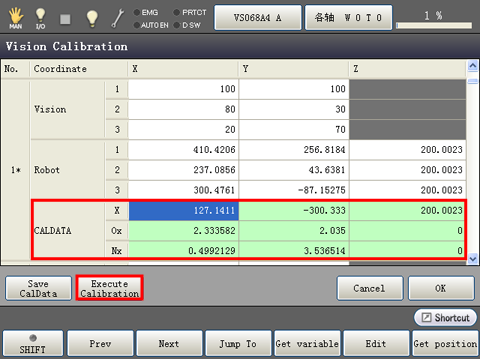
- 如果视觉坐标和机器人坐标均未输入3点,则将发生错误,导致无法计算。
- 在“CALDATA”栏中,按压[F5 编辑]按钮后可变更数值。
6
控制器电源OFF后仍要保持数据时,按压[保存校准]按钮。数据保存至保存用存储器。
7
通过以下任一方法关闭视觉校准画面。
按压[OK]按钮后,将数据保存至操作用存储器,并关闭视觉校准画面。
按压[Cancel]按钮后,不将数据保存至操作用存储器,直接关闭视觉校准画面。
控制器电源OFF时,无法保持操作用存储器的数据。详细内容请参照程序员指南的“数据的保存和变更”。
变换矩阵的数值输入
可通过其它方法计算变换矩阵时,也可仅输入变换矩阵的值。
实施上述Step1、Step2后,选择“CALDATA”的相应项目,并按压[F5 编辑]按钮。
ID : 5665