
ID : 5573
连接方法
就硬件的连接方法进行说明。
硬件的连接方法
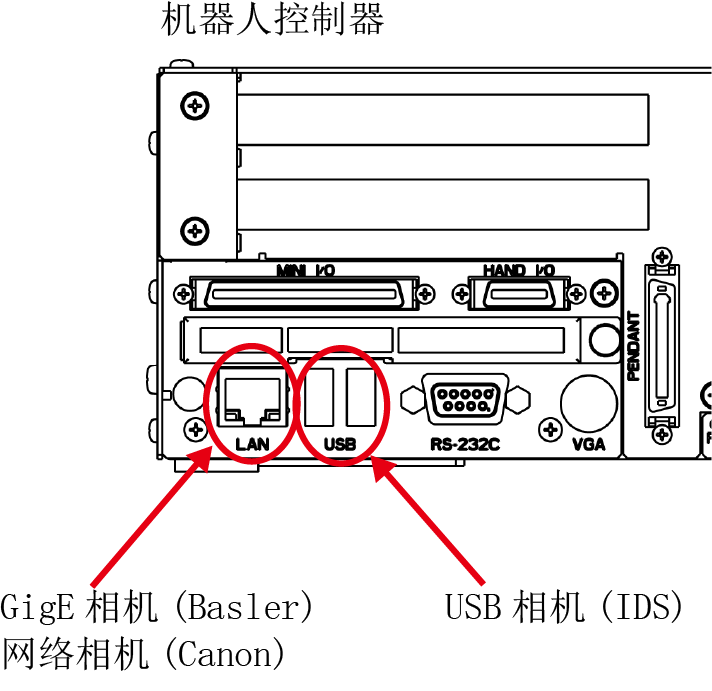
为USB相机(IDS)时,连接至机器人控制器的USB端口。
如果为GigE相机(Basler)及网络相机(Canon)时,则在设定时通过HUB连接至机器人控制器的LAN端口,执行时直接连接至机器人控制器的LAN端口。
使用GigE相机(Basler)的下述功能时,为避免发生数据干扰,建议单独将相机连接至PCI型的增设LAN端口(型式ETG3-PCI、I/O数据制作)。
- 使用力传感器(LAN连接)。
- 通过多台机器人进行传送跟踪。
- 使用协调功能等。
事前准备
进行以下事前准备。
控制器、PC的连接与IP地址设定
将PC通过LAN连接至控制器。为了进行PC与控制器的通信,指定各自的IP地址。关于控制器的IP地址设定,请参照多功能教导器操作指南中的“通信设定画面的显示、更改”。
视觉选件的有效化(必要时)
将控制器的“DENSO Robot Imaging Library”设定为有效。已组装时或使用EVP时,无需作业。
设定时,需要许可证。详细内容请参照“选项功能和许可证”。此外,关于设定方法,请参照选项的“许可证登录”。
ID : 5573