
ID : 5570
概要
“内置视觉”是通过机器人控制器执行图像处理的功能。如果使用“内置视觉”,则无需另行准备视觉控制器。
如下图所示,将FA相机直接连接至机器人控制器上使用。
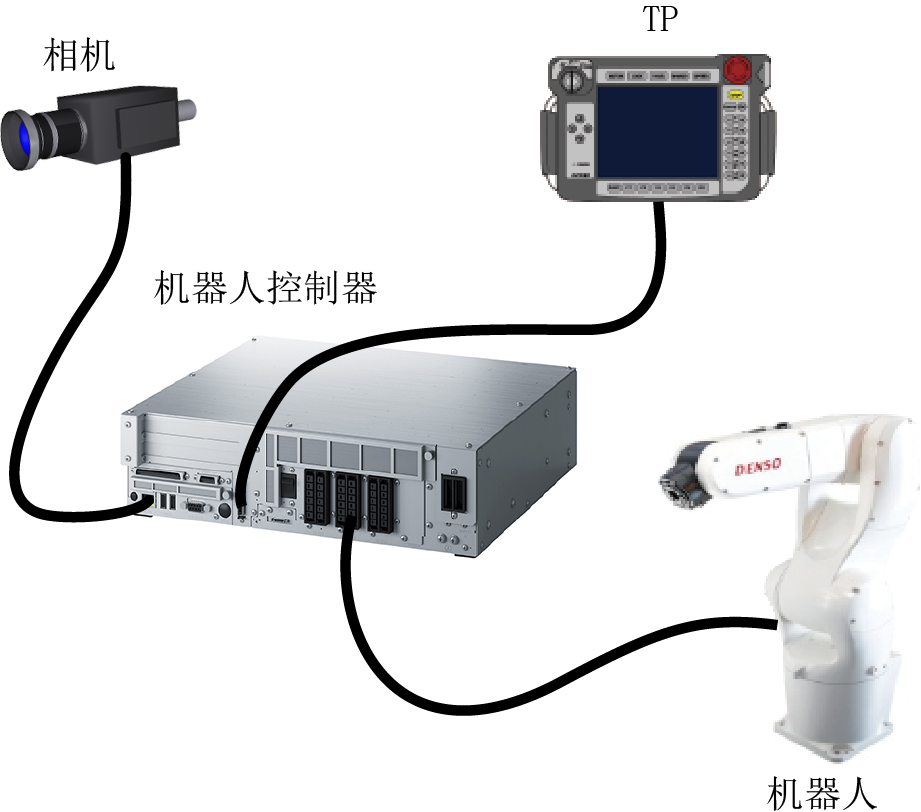
可连接的FA相机如下。
- USB相机
将相机连接至机器人控制器的USB端口上使用。
在RC8系列中,可使用IDS公司制造的USB相机。
RC8系列的USB端口为USB2.0,因此USB3.0相机不推荐。(仅确认过USB2.0相机的动作。) - GigE相机
将相机连接至机器人控制器的LAN端口上使用。
RC8系列可使用Basler公司制造的支持GigE的区域传感器相机ace系列。
(GigE:Gigabit Ethernet) - 网络相机
将相机连接至机器人控制器的LAN端口上使用。
RC8系列可以使用Canon公司制造的网络相机WebView Livescope系列。
当连接使用机器人机内配线的照相机(GigE照相机),并在外部触发模式下发生触发器错误检测时,通过照相机的参数设置可改善错误检测。
设定、调整时的构成
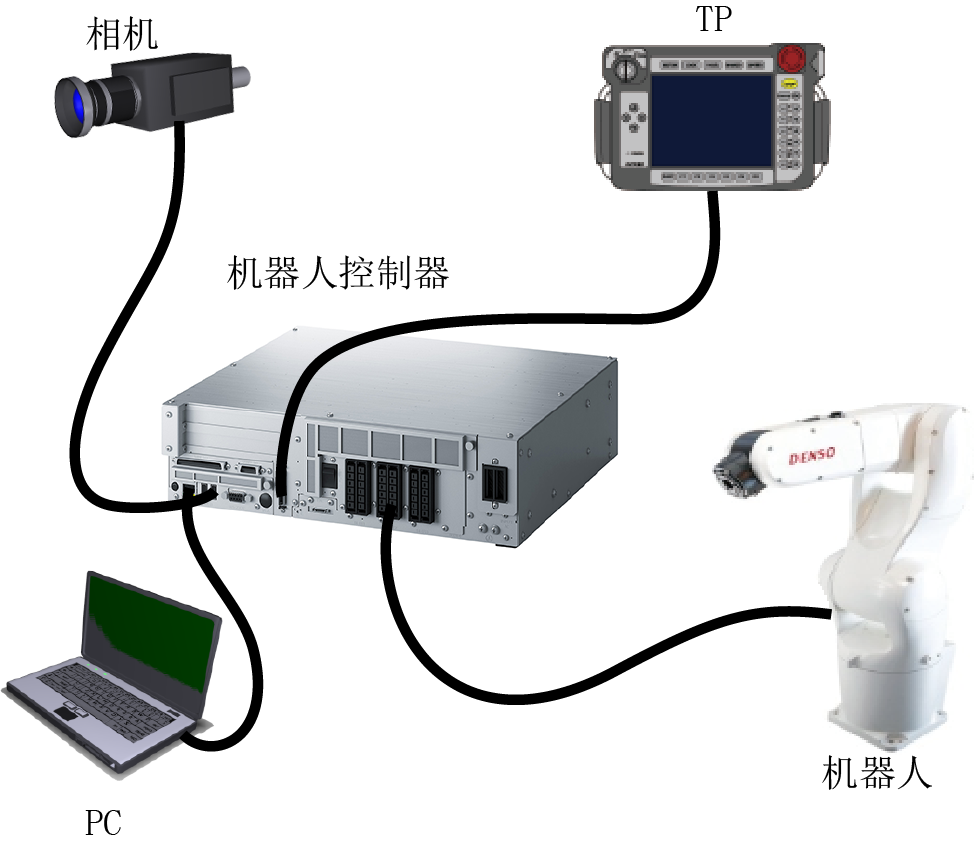
设定、调整时,利用PC进行处理或图像的确认。
USB相机时
将PC连接至机器人控制器的LAN端口。
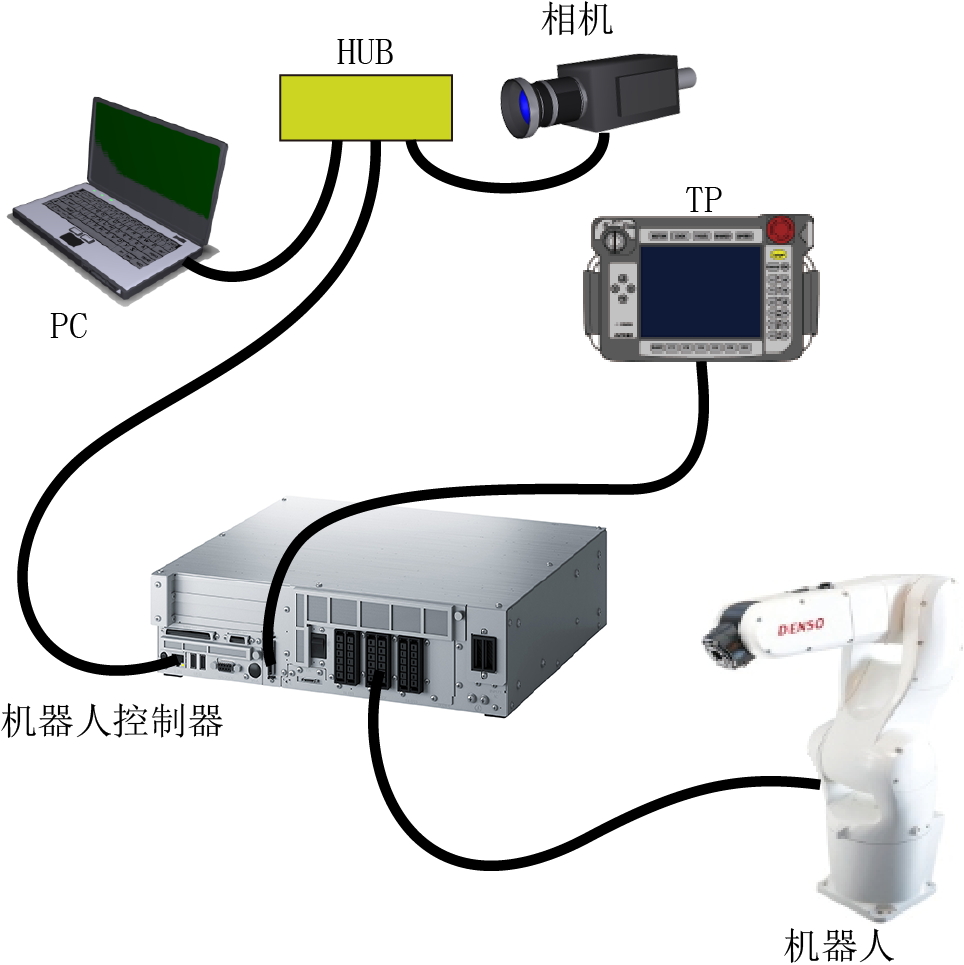
GigE相机以及网络相机时
由于机器人控制器的LAN端口仅有1个,因此通过HUB连接PC和相机。设定、调整结束后,拆下HUB,将相机直接连接至机器人控制器。
ID : 5570