
ID : 5450
CALSET实施前的确认事项
VS-6556/6577系列机器人中无4轴机械末端。
实施CALSET时,如果4轴的CALSET位置错误旋转1圈(360°),则导致机内配线卷入曲柄并断线。执行无4轴机械末端机型的CALSET时,请确认以下的标准4轴位置后进行作业。
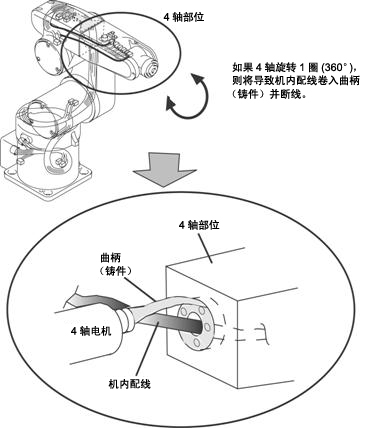 |
注意如果4轴旋转360°以上,则可能会导致机内配线断线(无4轴机械末端机型)
CALSET实施前的4轴位置确认
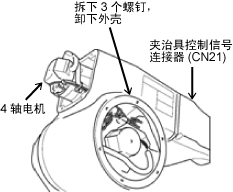
- 手动运行4轴,以便夹治具控制信号连接器移至上方。
- 拆下第二机械臂的外壳,以便查看机内配线。 下图表示各机型的拆卸外壳。
VS-6577 VS-6556 
- 确认4轴是否处于标准位置。
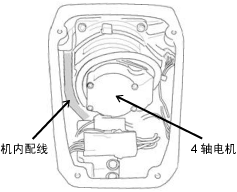
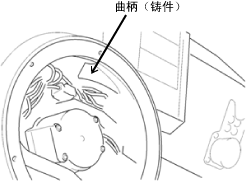
“第二机械臂的夹治具控制信号连接器(CN21)面为上侧”时,“机内配线未卷入曲柄的状态”为标准位置。
VS-6577时的确认方法 可看到机内配线即为正常。(如果机内配线卷入曲柄则看不到)
VS-6556时的确认方法 可看到机内配线处于此状态即为正常。
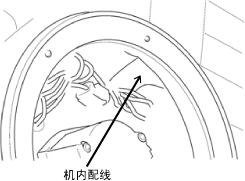
从左图状态开始旋转4轴时,机内配线将卷入曲柄,在左图位置看不到。
(图为250°旋转附近)
- 未处于标准位置时,手动运行4轴移至标准位置。至此,CALSET前的准备完成。
请注意,如果省略以上步骤,则4轴的CALSET位置可能错误旋转1圈(360°),此时将导致机内配线卷入曲柄并断线。
ID : 5450