
ID : 5440
变更第2轴的机械末端
VS-6556/6577系列出厂时,设计机械末端使第2轴的动作角度为下表的角度。
动作角度由设定在机械末端内侧的软件限制决定。
出厂时的动作角度(VS-6556/6577系列)
| 机器人型式 | 2轴的动作角度 |
|---|---|
| VS-6556型 | +135°、-100° |
| VS-6577型 | 与上述相同 |
追加机械限动器并将变更第2轴的机械末端称作机械末端变更。
变更第2轴的机械末端时,需要用户准备机械限动器。
变更机械末端位置时,请变更机械末端内侧的软件限制(PLIM,NLIM)。
另外,变更机械末端的同时变更RANG值时需要进行CALSET。
RANG值为确定机器人基准位置和机械末端关系的角度,也称为基准角或准备角(Ready angle)。
- 需要进行CALSET时(例如更换电机时等),如果拆下用户准备的机械末端变更零部件,进行CALSET,则在变更机械末端的同时无需变更RANG值及进行CALSET。
- 需要进行CALSET时,如果在机械末端变更零部件安装的状态下进行CALSET,变更机械末端的同时需要变更RANG值及进行CALSET。 此时,请注意精度与用户制作的机械末端变更零部件有关。 另外,请用户参照“项目备份”进行RANG值和CALSET值变更后值的管理。
记载有变更第2轴的机械末端时,无需变更RANG值及进行CALSET的示例。
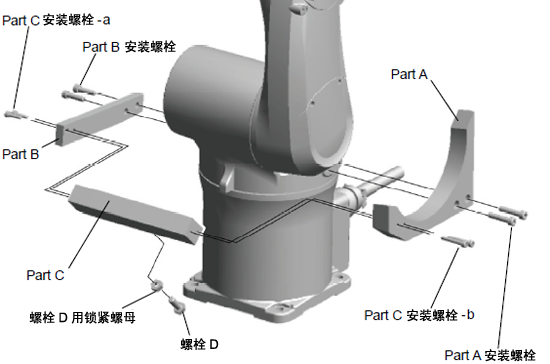
2轴机械末端变更的概要
变更2轴机械末端时,需要将以下零部件安装到机器人本体上。
ID : 5440
- 本页相关信息
- 2轴机械末端的制作图纸示例