
ID : 5431
机器人的搬运方法
1
将机器人设定为下图所示的搬运姿势。手动移动第2轴、第3轴、第4轴,使其变为搬运姿势。
由于交货时的包装状态即为搬运姿势,因此最初无需执行此作业。
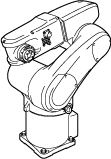
- 搬运姿势
| 轴 | 角度 |
|---|---|
| 第1轴(J1) | -90° |
| 第2轴(J2) | -55° |
| 第3轴(J3) | +163° |
| 第4轴(J4) | -90° |
| 第5轴(J5) | -90° |
2
从机器人本体拔下本体之间电缆、气动配管、用户用信号电缆。
交货时的包装状态下无需执行此作业。
3
如下图所示,安装吊环螺钉。
交货时的包装状态下带有吊环螺钉,因此无需执行此作业。
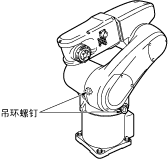
吊环螺钉的安装
4
如下图所示,在第2臂上夹住纱头,在2处吊环螺钉上固定钢缆。
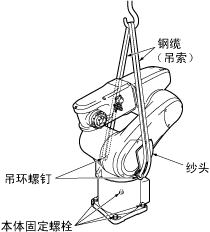
钢缆的悬挂方法
5
为防止机器人倾倒,操作人员A支撑机器人的同时卸下本体固定螺栓。
6
操作人员B操作起重机,将机器人本体移动到指定位置。
7
将机器人放置在安装位置,操作人员A使用4个本体固定螺栓,临时固定机器人。
8
根据“机器人的安装方法”的说明,固定机器人。
9
从本体上拆下吊环螺钉。
- 请确认在机器人的搬运方向无障碍物。
- 拆下吊环螺钉后运行机器人。如果在不拆下吊环螺钉的状态下运行机器人,则机器人手臂和吊环螺钉可能发生碰撞。
ID : 5431