
ID : 5217
动作模式的种类
手动模式中包括各轴模式、X-Y模式、TOOL模式3种模式。3种模式中的任何一种模式下,都可以通过多功能教导器或小型教导器手动操作机器人。
各轴、X-Y、工具模式相应的机器人操作
| 6轴机器人 | 4轴机器人 | |
|---|---|---|
| 各轴模式 | 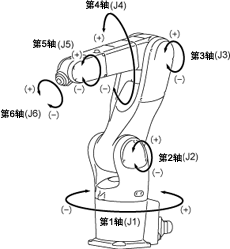 | 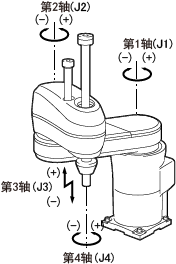 |
| 6个轴分别单独动作。 | 4个轴分别单独动作。 | |
| X-Y模式 | 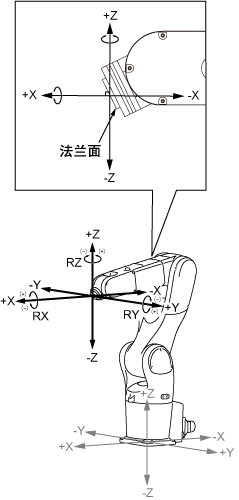 |
 |
| 沿直角坐标直线动作。 | 沿直角坐标直线动作。 | |
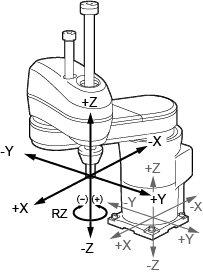
| 工具模式 | 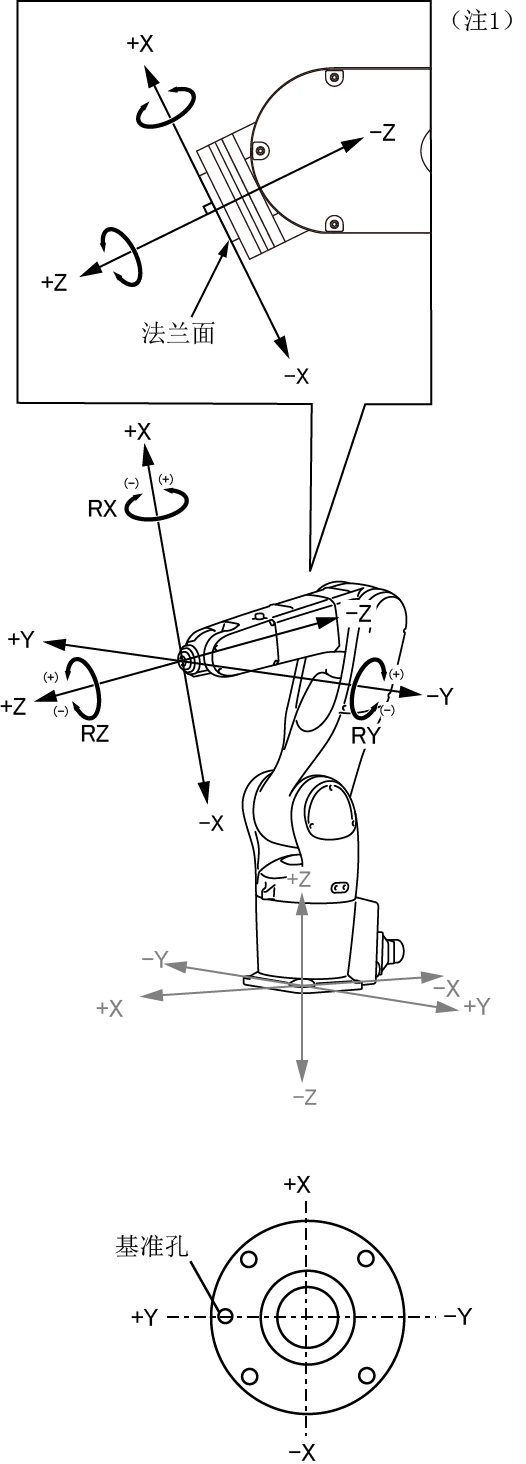 |
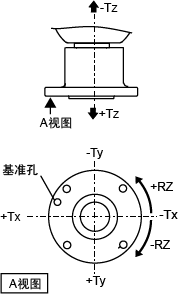
4轴机器人工具安装用法兰的
|
| 沿机器人法兰面的X、Y、Z轴直线动作。 | 沿第4轴的直角坐标直线动作。 |
注1:本图是设为TOOL0时的工具坐标系。该坐标系也称为机械界面坐标系。
5轴机器人只有在法兰正确地与机器人XY平面平行(RX、RY为0度)时,才能保持固定的法兰姿势(法兰的三维朝向)。除此之外,法兰姿势不相同。
手动模式下,机器人在法兰(机械界面)及TCP点的最高速度不得超过250mm/s。
但是,请注意位于距TCP一定距离的可动部分(工具外围部分、外部的用户配线等)可能超过限制速度。
(TCL:工具坐标系的原点)
手动模式切换方法
运行开始时,请将速度设定在20%以下进行操作。如果开始就高速运行,则机器人可能与周围的设备发生碰撞。
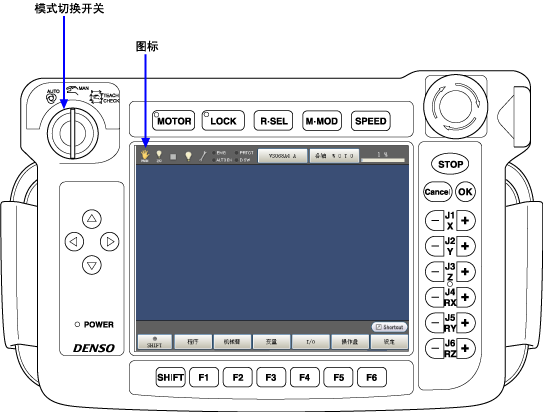
- 使用多功能教导器时
1
将模式切换开关调整为[MAN]。
2
按压[M-MOD]。
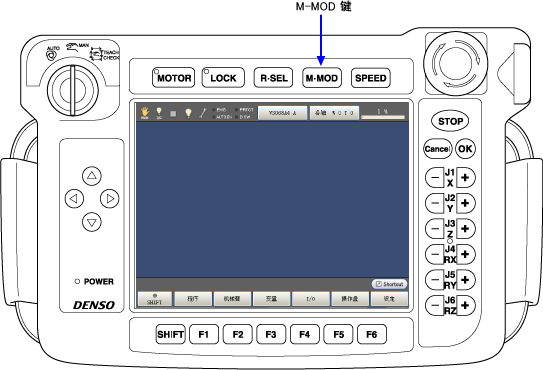
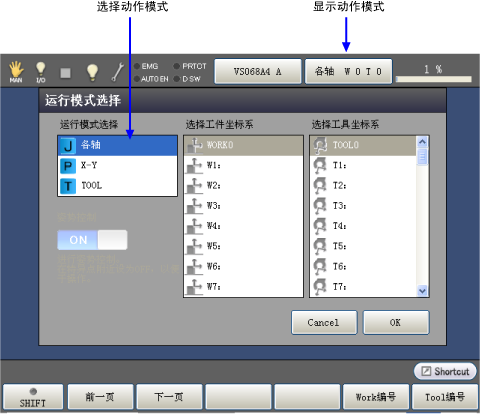
将显示下一步骤所示的[运行模式选择]视窗。
3
使用光标键、或者直接触摸画面选择模式,按压[OK]。
在状态栏的模式显示部分显示选择的动作模式。
ID : 5217