
ID : 5215
多功能教导器的使用
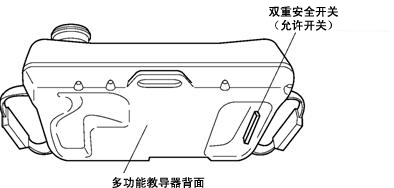
双手拿住多功能教导器进行操作。多功能教导器配有确保安全的双重安全开关,如下图所示,可通过手指压住即可操作。
多功能教导器的手持方法与双重安全开关
双手拿住多功能教导器进行操作。

使用多功能教导器用手动模式操作机器人时,操作人员不幸发生丧失意识、死亡等意外而无法进行正常操作时,双重安全开关将自动且安全的停止机器人动作。操作人员不幸处于上述状态时,双重安全开关的按压力度会变得微弱或者过大。
双重安全开关设计为3位置开关,以便识别以下3种操作状态。
- 未按压或按压力度弱→开关OFF
- 按压力度正常→开关ON
- 按压力度过大→ 开关OFF
开关为OFF的情况下,机器人停止,无法运行。
为了确保多功能教导器的安全性,进行了例如在手动模式时为了按压移动方向键让机器人运行时必须同时按压双重安全开关的设计。
双重安全开关,也被称为允许开关。
请不要使用粘胶带等将双重安全开关固定在按压状态。否则在手动模式下进行操作过程中,紧急情况下不能停止机器人运行,是非常危险的。
在按住双重安全开关的情况下,从手动模式切换到教导检查模式,并从教导检查模式切换到手动模式时,电机电源不会OFF。(Ver.1.13.*或更高版本)
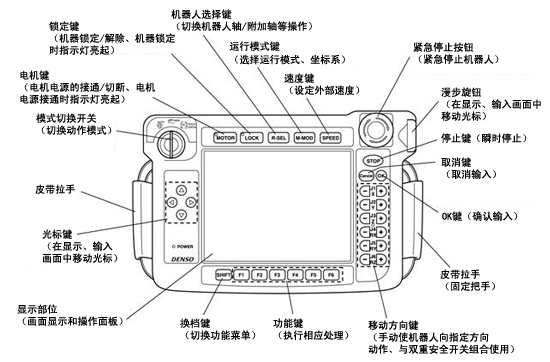
多功能教导器的键、按钮、开关的名称
多功能教导器的键、按钮、开关等名称如下图所示。
在开始运行机器人前,请正确了解这些按键、开关、按钮等处于什么位置等,以便熟练地进行操作,且确保安全。
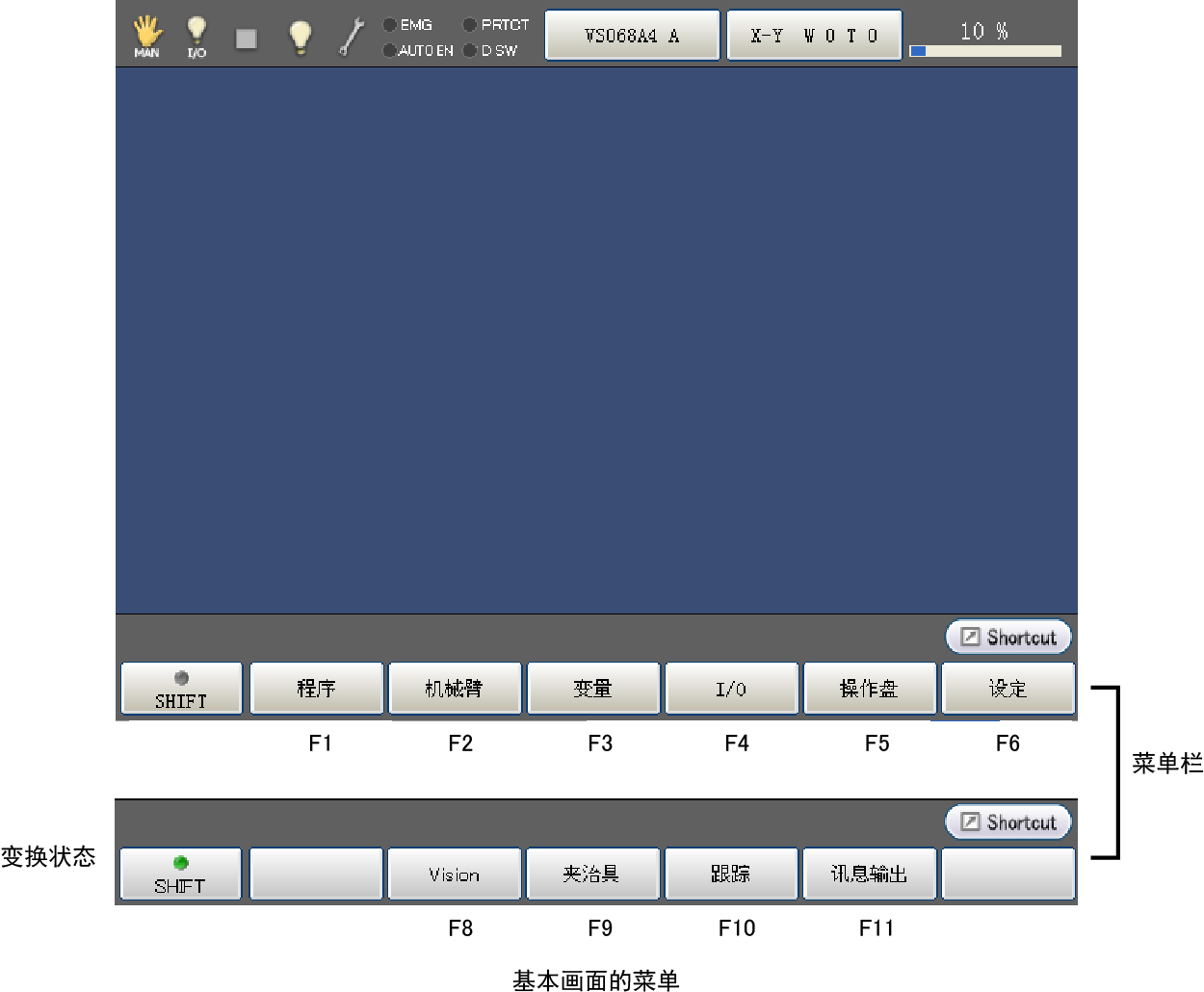
多功能教导器的基本画面
最初接通控制器的电源时会显示语言选择画面。
设定方法请参照“接通机器人控制器的电源”。
关于图标
基本画面中显示的各状态请参照下表。

| № | 名称 | 说明 | |
|---|---|---|---|
| (1) | 动作模式 |  |
自动模式 |
 |
手动模式 | ||
 |
教导检查模式 | ||
 |
模式未选择 | ||
 |
直接模式 | ||
 |
发送至PC中 | ||
 |
从PC接收中 | ||
 |
发送至USB中 | ||
 |
从USB接收中 | ||
 |
连接VirtualTP/RemoteTP。 | ||
| (2) | 启动权 |  |
任意 |
 |
COM | ||
 |
以太网 | ||
 |
I/O | ||
 |
TP | ||
| (3) | 程序执行状态 |  |
程序停止中 |
 |
程序执行中 | ||
 |
特权任务执行中 | ||
 |
程序和特权任务执行中 | ||
 |
讯息输出(执行PrintMsg指令时显示) | ||
|
特异点附近(处于特异点附近时鸣响蜂鸣器) | ||
| (4) | I/O状态、机械臂状态 |  |
虚拟输入未使用且I/O锁定未设定 (注)I/O锁定:限制与外部机器的I/O通信 |
 |
虚拟输入使用中或I/O锁定状态 | ||
 |
虚拟栅栏或者排他功能有效。 | ||
| (5) | 系统状态 |  |
系统正常状态 |
 |
系统异常状态
|
||
| (6) | 开关输入状态 | EMG | 紧急停止状态 |
| AUTOEN | 自动允许状态 | ||
| PROTECT | 防护停止状态 | ||
| DSW | 双重安全开关状态 | ||
| (7) | 机器人选择按钮 | 机器人类型的选择和显示 | |
| (8) | 动作模式 | J:各轴 P:X-Y 显示模式 T:TOOL |
|
| (9) | 工件坐标 | 显示所选择的工件编号 | |
| (10) | 工具坐标 | 显示所选择的工具编号 | |
| (11) | 速度按钮 | 外部速度的设定和显示 | |
ID : 5215