
ID : 5209
6轴机器人的坐标系
操作6轴机器人时的坐标系有以下3类。
- 基础坐标系
- 工件坐标系
- 工具坐标系
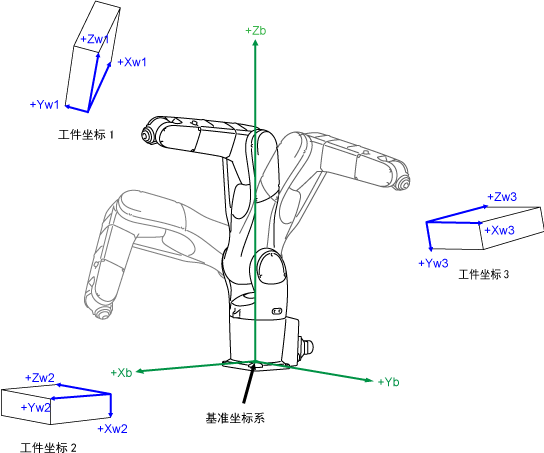
6轴机器人的基础坐标系
基础坐标系是指以机器人的基准中心为原点的三维直角坐标。机器人的“基础”是指安装机器人第1轴的部分。
基础坐标系的X轴表示为Xb、Y轴为Yb、Z轴为Zb。
6轴机器人的工件坐标系
工件坐标系是指在“工件”(机器人的作业对象)的各作业空间内定义的三维直角坐标。可在任意位置指定其原点。
工件坐标是用相对于基准坐标的坐标原点位置(X,Y,Z)与围绕基准坐标的X轴、Y轴、Z轴的旋转角度(RX,RY,RZ)来表示。最多可注册7类,附带工件坐标编号1~7。
工件坐标未定义的情况下是基础坐标。
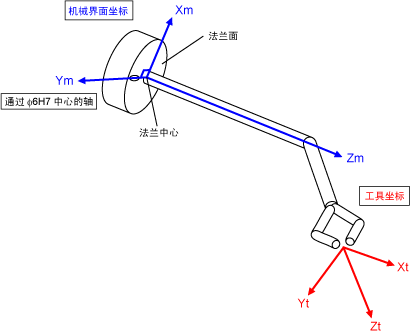
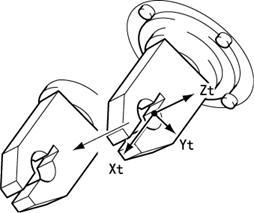
6轴机器人的工具坐标系
机器人手臂前端的工具安装面称为法兰。此外,以法兰中心为原点的3维正交坐标称为机械界面坐标系。
工具坐标系是指以法兰上安装的工具前端为原点的3维直角坐标系。以机械界面坐标的原点为基准定义平移量及旋转角度。
下图为VM的示例。
通过其它机器人的Y轴的孔为φ5H7。
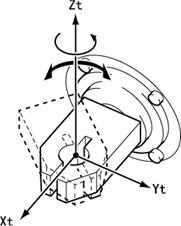
6轴机器人工具坐标系的优点
用手动模式使其动作的情况下,如果使用工具坐标系,则可以将夹治具面向任意方向运行,容易进行教导。
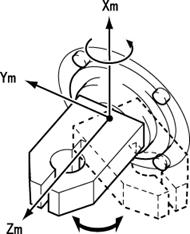
与机械界面坐标系适用时的动作比较如下图所示。
| 机械界面坐标系(TOOL0) | 工具坐标系 |
|---|---|
按压X-时
|
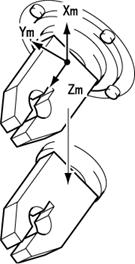
按压Z-时
可以进行将夹治具面向任意的方向移动的教导。 |
按压RX+时
 |
按压RZ+时
可以进行以夹治具为中心的旋转动作的教导。 |
ID : 5209