
ID : 5106
操作盘画面
主画面
启动机器人程序(TSR10.pcs)后,启动操作盘。
起动操作盘后,将显示下图所示的主画面。
按压“校准画面”后,将切换至校准用画面。
按压“用户画面”后,将切换至用户创建的画面。

校准用画面
准备下述校准用画面。可用于3点教导式校准作业。
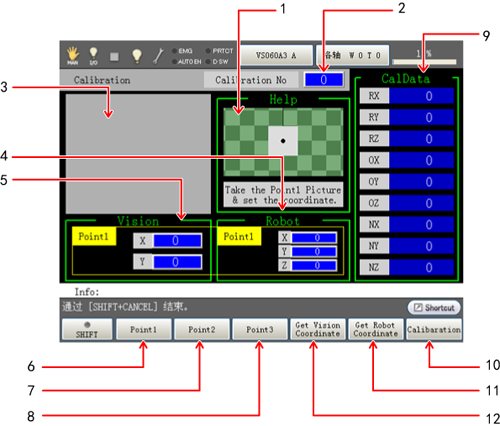
各按钮的动作内容
就各按钮的动作内容进行说明。
| 1 | Help画面。显示下一操作的简单说明。 |
| 2 | 设定Calibration No。可保存31组校准数据。 |
| 3 | 显示相机拍摄的图像。(COGNEX、PANASONIC时可显示) |
| 4 | 表示点1~3的机器人坐标。 |
| 5 | 表示点1~3的视觉坐标。 |
| 6 | 切换至Point1的教导坐标(机器人、视觉)。 |
| 7 | 切换至Point2的教导坐标(机器人、视觉)。 |
| 8 | 切换至Point3的教导坐标(机器人、视觉)。 |
| 9 | 显示注册至Calibration No的校准数据。 |
| 10 | 计算校准数据。 |
| 11 | 获取机器人坐标。 |
| 12 | 获取视觉坐标(标记的重心位置)。(使用4个公司的对应视觉装置时可使用) |
就按下SHIFT键时显示的菜单进行说明。
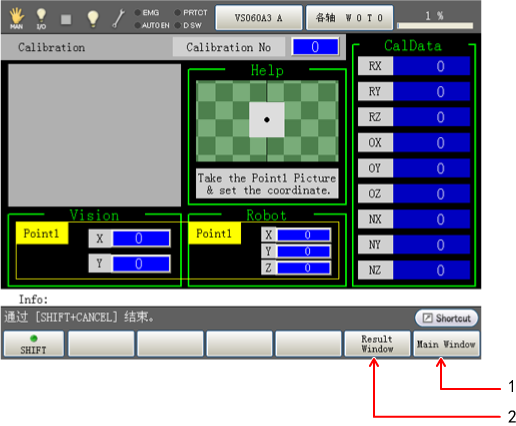
| 1 | 切换至主画面。 |
| 2 | 切换至结果确认画面。可确认校准结果。 |
点教导方法
视觉坐标和机器人坐标分别逐处教导3处的方法。准备相机图像中仅拍摄1点标记的校准治具,点1~3的各视觉坐标和机器人坐标设定为一组进行教导。
另外,视觉装置为对应4个公司的产品时,支持视觉坐标的自动输入。
结果确认画面
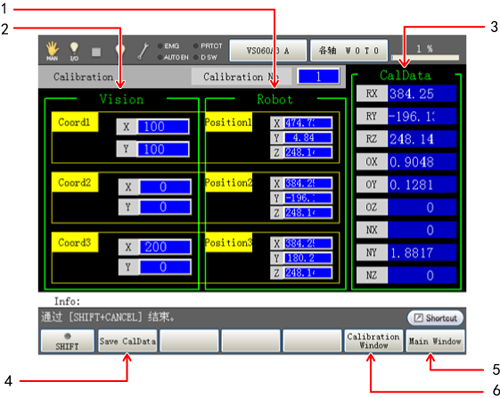
可确认和保存校准计算中使用的标记的视觉坐标和机器人坐标及由此计算出的结果的CalData。如果更改Calibration No(0~31),则可确认各自的计算结果。
| 1 | 可确认点1~3注册的机器人坐标。 |
| 2 | 可确认点1~3各注册的视觉坐标。 |
| 3 | 可确认由注册的各坐标计算出的校准数据。 |
| 4 | 计算出的CalData保存至专用的数据库。 |
| 5 | 切换至主画面。 |
| 6 | 返回Calibration Window。 |
ID : 5106