
ID : 4889
适应动作确认
利用动作确认用程序运行,一边提高外部速度一边确认动作。步骤如下所示。
确认步骤
1
创建动作确认用程序。例子如下所示。
'!TITLE "读入附加轴的扭矩、电流绝对值等"
Sub Main 'EX_TEST2
TakeArm 1 Keep = 1
SysLog.Servo.Start ‘开始伺服LOG
DriveA @0 (7,100),S=100 '附加轴动作命令
Delay 100 ‘定时器
DriveA @0 (7,6000),S=100 '附加轴动作命令
Delay 100 '定时器
SysLog.Servo.Stop ‘结束伺服LOG
End Sub2
首先将外部速度设成10%左右,然后使动作确认用程序动作。慢慢提高外部速度。最后以100%实施动作确认
如果在提高外部速度的中途发生加速度错误,将轨道参数的“电机最高速度设定 (rpm)”下降500rpm下,然后重新从“自动增益调整实施”开始实施。
3
以外部速度100%执行动作出现错误时,通过WINCAPSIII从伺服LOG抽取数据,显示图表。
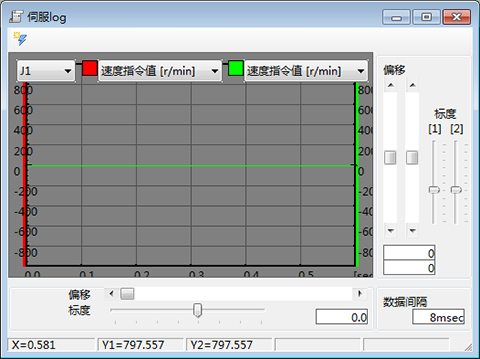
4
从STEP3的图表再次确认自动增益调整的状态。
另外,该数据也可以使用WINCAPSIII的导出功能,以CSV格式进行保存。
ID : 4889