文字大小
<< 向前 下一页 >>
ID : 4782
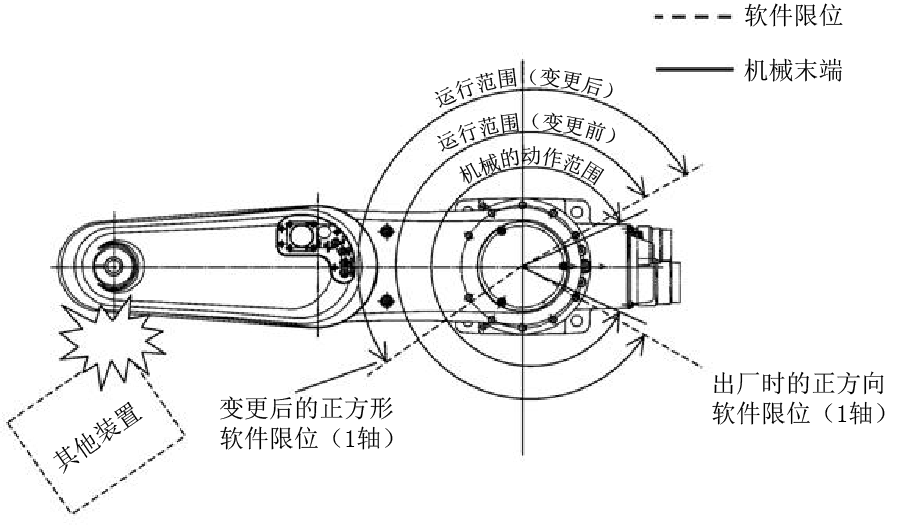
机器人与其它装置发生干扰时,如下图所示,变更软件限位并缩小运行范围。
另外,夹治具用气动配管和配线由于机器人的动作而绷紧时,也应变更软件限位并缩小运行范围。
变更软件限位时,务必将机器人的动作设定在初始设定以内的范围。
 HOME
HOME