
ID : 4628
悬挂安装(HMS)示例
基本操作步骤如下所示。请参考该作业步骤,进行机器人本体的搬运、安装作业。
- 机器人本体质量约为56kg(约124lb),因此,请准备起吊负荷为0.2吨以上的起重机及叉式升降机。
- 应由2名以上获取起吊作业、起重机驾驶及叉式升降机驾驶资格的操作人员进行悬挂安装作业。
- 必须穿戴安全鞋、安全帽、护目镜和手套。
1
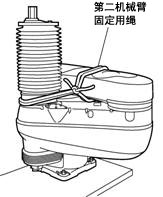
机器人本体开箱后如下图所示。确认固定机器人的第二机械臂以防旋转。
在悬挂安装作业完成前,请勿拆卸第二机械臂固定钢缆。(防止由于机器人手臂自重旋转导致危险)
<HMS>
2
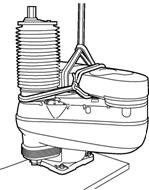
请将吊索绕第一机械臂部位1圈,并穿过一侧的吊环部。
3
将吊索的吊环部位挂在起重机的吊钩上。

4
拆下固定用螺栓,并从托板上拆下机器人本体。
拆下固定用螺栓时,由1名操作人员支撑,以防机器人倾倒。

5
保持机器人的姿势,同时缓慢地上升起重机。
特别是要事先确认脚下没有作业障碍物。

6
上升至可翻转机器人的位置后停止起重机,由2名操作人员翻转机器人。

7
由2名操作人员将机器人保持为翻转姿势,同时缓慢上升起重机,将机器人的基准面与安装面对准,并插入4根安装用螺栓进行临时固定。
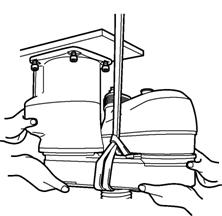
8
请根据“机器人本体的固定方法”进行固定。
螺栓的安装扭矩: 128±20Nm(HMS时)

9
安装面的螺栓固定完成后,从吊钩上拆下吊索,并拆下第二机械臂固定钢缆。
拆下机器人本体时,通过钢缆进行固定处理,以防第二机械臂旋转。
ID : 4628