
ID : 4625
机器人本体的安装环境
安装机器人本体及机器人控制器时,请确认使用环境符合“安全注意事项”中的“安装注意事项”的各个项目。另外,注意请勿使设备受到振动的影响。
如果安装环境不合适,不仅功能和性能无法充分发挥,还可能缩短设备使用寿命或导致意外故障。
环境温度和湿度
请将动作时的环境温度设定在0~40℃范围内。
请确保湿度在90%以下且无结露。
振动
请避免在存在过度振动或冲击的环境下安装。
运输设备时,请将运输时的机器人靠到各轴机械限动器,以免给所安装的机器人造成过度振动或冲击。请采取措施,例如在各轴上使用缓冲材保护。
如果运输中的过度振动施加到电源OFF时的机器人本体上,则可能发生错误0x8320411*“编码器基准位置异常”。
购买后初次使机器人处于“接通电源”状态时,如果发生错误0x8320411*“编码器基准位置异常”,则根据错误编码表的恢复处理栏进行处理,或联系本公司售后服务部门。
机器人本体与机器人控制器的连接
机器人本体与机器人控制器以组合型式调整出厂。购买多台机器人时,请勿错误组装机器人本体和机器人控制器。
配套的机器人本体和机器人控制器的串行编号相同。
机器人本体的安装环境
机器人本体的安装环境如下表所示。另外,参考下图,准备具有足够刚性的安装架台。
- 请勿对配备机器人的设备进行电气焊接。电机编码器和机器人控制器中流经大电流,存在发生故障的危险。必须进行电气焊接时,应从设备中暂时取出机器人本体和机器人控制器。
- 请避免喷流直接溅到折皱保护罩部位的使用方法。
| 项 目 | 环境和条件 |
|---|---|
| 安装架台的平面度 | 0.1/500mm(参照图) |
| 安装架台的刚性 | 使用钢铁材料(参照图) |
| 安装方向 | 地面设置或悬挂(仅HMS) |
| 环境温度 | 运行时:0~40℃ 保管、运输时:-10~60℃ |
| 湿度 | 运 行 时:20~90%RH(不可结露) 保管、运输时:40~75%RH(不可结露) |
| 振动 | 运行时:4.9m/s2(0.5G)以下 保管、运输时:29.4m/s2(3G)以下 |
| 高度 | 运行时:1,000m以下 |
| 安全的安装环境 | 请参照“安全注意事项”的确保适当的安装环境。 |
| 作业空间等 | ・要充分确保点检、拆解的空间 ・在机器人背面留出配线空间,将配线固定到安装面或横梁上以防止电缆自身重量直接施加到连接器上 本体之间电缆配线空间
|
| 接地条件 | 参照“机器人本体的接地” |
地面设置机器人的安装架台示例
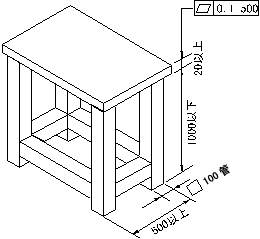 |
- 如果机器人高速运行,则会对安装架台施加较大的反作用力。保持足够的刚性,以防由于反作用力导致架台振动或错位。另外,将其它大质量设备与机器人架台进行机械式组装也可有效防止振动或错位。
- 有些架台可能在机器人动作时产生共振音(轰鸣音)。共振音较大时,提高架台的刚性或稍微更改机器人的速度。
悬挂安装架台的示例
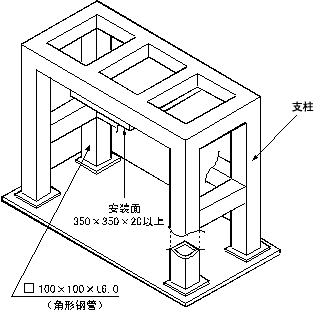 |
- 如果悬挂型机器人高速运行,则会对顶板结构施加较大的反作用力。采取充分的防振构造,以防由于反作用力导致顶板振动。另外,机器人安装用的顶板结构与设备内的其它顶板结构相分离,为独立的结构。
- 有些架台可能在机器人动作时产生共振音(轰鸣音)。共振音较大时,提高架台的刚性或更改机器人的速度。
ID : 4625