
ID : 3458
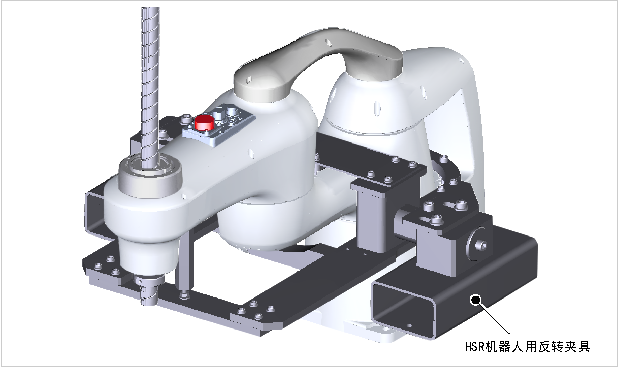
反转夹具的制作例子
在此说明设置悬挂机器人所需的反转夹具的一例。
要使悬挂用HSR机器人反转,制作下图所示的反转夹具。
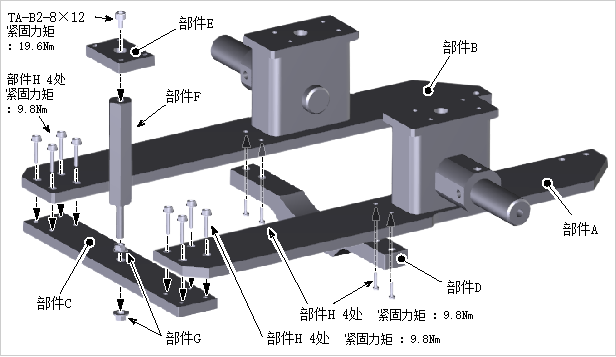
1
如下图所示装配部件A~部件H。请参照下表的参考图,制作各部件。
| 编号 | 参考图 |
|---|---|
| 部件A |
PLATE(图纸(PDF:310KB)) |
| 部件B |
PLATE(图纸(PDF:353KB)) |
| 部件C | PLATE(图纸(PDF:132KB)) |
| 部件D | PLATE(图纸(PDF:136KB)) |
| 部件E | BRACKET(图纸(PDF:247KB)) |
| 部件F | HEXAGON SUPPORT (株)Misumi公司制造 PLSBH24-115-F40-M8-N8(图纸(PDF:88KB)) |
| 部件G | NUT (株)Misumi公司制造 FRNUT8((PDF:246KB)) |
| 部件H | 法兰盘插座 M6×25 (株)Misumi公司制造 070006025((PDF:484KB)) |
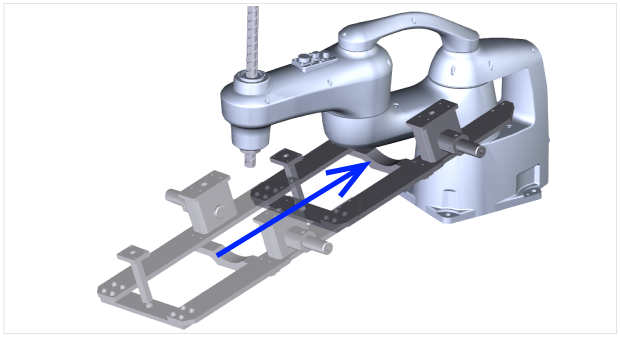
2
一边注意避免撞击机器人的T轴,一边将STEP1装配的夹具装进机器人。
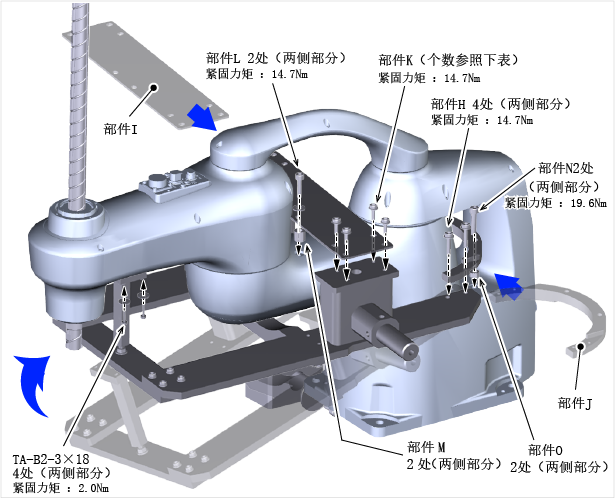
3
用部件I~部件O以及螺栓固定STEP1装配的夹具和机器人。
| 编号 | 参考图 |
|---|---|
| 部件I |
|
| 部件J | BRACKET(图纸(PDF:121KB)) |
| 部件k |
|
| 部件L |
|
| 部件M | COLLAR : 内径6.5L13.5 : 2处 (株)Misumi公司制造 DWSSM-D14.5-V6.5-L13.5((PDF:419KB)) |
| 部件N | 螺栓 (株)Misumi公司制造 CB8-35((PDF:86KB)) |
| 部件O |
COLLAR : 内径8.5L8 : 2处 (株)Misumi公司制造 DWSSM-D15-V8.5-L8((PDF:236KB)) |
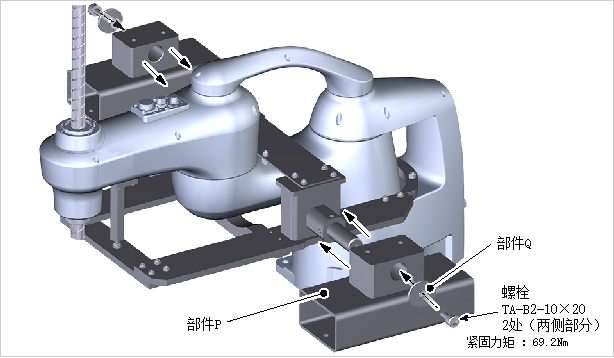
4
将部件P和部件Q安装在STEP3装配的夹具上。请参照下表的参考图,制作各部件。
| 编号 | 参考图 |
|---|---|
| 部件P | PLATE(图纸(PDF:330KB)) |
部件Q |
COVER(图纸(PDF:102KB)) |
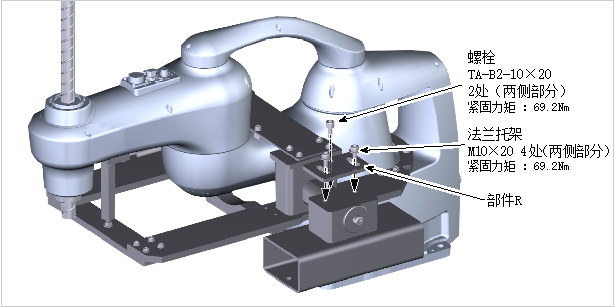
5
用部件R和螺栓固定STEP4装配的部件Q。请参照下表的参考图,制作各部件。
| 编号 | 参考图 |
|---|---|
| 部件R | PLATE(图纸(PDF:109KB)) |
ID : 3458