
ID : 3149
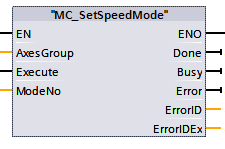
MC_SetSpeedMode
设定最佳速度控制功能。
| 图形显示 | FB编号 | FB范畴 |
|---|---|---|
 |
FB2017 | 动作 |
输入参数
| 参数名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | Int | 1以上 | 1 | 不可以 |
|
||||
| Execute | Bool |
|
False | 不可以 |
|
||||
| ModeNo | Int | 0~3 | 0 | 可以 |
|
||||
输出参数
| 参数名 | 数据型 / 说明 |
|---|---|
| Done | Bool |
|
|
| Busy | Bool |
|
|
| Error | Bool |
|
|
| ErrorID | Word |
|
|
| ErrorIDEx | DWord |
|
功能说明
为根据机器人的前端负荷或姿势,设定最佳速度、加速度的功能。可选择下表所示的4种模式。
| 模式 | 设定内容 | |
|---|---|---|
| PTP动作 | CP动作 | |
| 0 | 根据机器人的负荷条件值,设定PTP动作时的最高速度和最高加速度。 | 根据机器人的负荷条件值,设定CP动作时的最高速度和最高加速度。 |
| 1 | 根据机器人的负荷条件值和动作中机器人的姿势,设定PTP动作时的最高速度和最高加速度。 | 与模式0相同 |
| 2 | 与模式0相同 | 根据机器人的负荷条件值和动作中机器人的姿势,设定CP动作时的最高速度和最高加速度。 |
| 3 | 与模式1相同 | 与模式2相同 |
如果在XR、SC机器人以及MC8上指定模式1、3,分别被设为模式0、2。
注意事项
若要执行这个FB,需要事先将FB范畴"动作"的FB设为可执行状态。
若要将FB范畴"动作"的FB设为可执行状态,使用FB"MC_Power"。
ID : 3149