
ID : 2963
机器人控制器的设定
通过多功能教导器设定机器人控制器。
设定变更后,重启机器人控制器,设定被反映。
操作路径:基本画面 - [F6 设定] - [F5 通信与启动权] - [F5 SlaveMotion设定]
仅在以维护等级登录时,才可编辑[F5 SlaveMotion设定]。
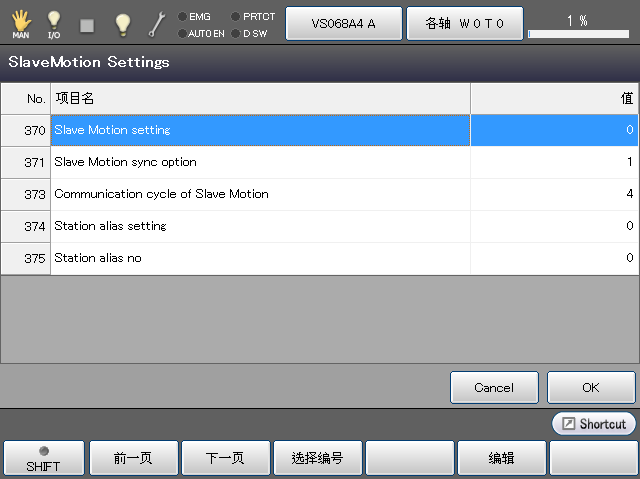
| 项目名 | 设定范围 | 初始值 | 内容 |
|---|---|---|---|
| SlaveMotion有效设定 | 0~1 | 0 | 可进行SlaveMotion的有效设定、通信协议的选择。 0:SlaveMotion无效 1:SlaveMotion有效(EtherCAT) |
| SlaveMotion同步选项 | 0~1 | 0 | EtherCAT主局设备通知指令值的更新,可减轻因为通信延迟等引起的同步偏差导致的速度过大、加速度过大错误的发生。选择了“1:通知有效”时,请从EtherCAT主局发布指令值更新的通知。更新通知使用Controlword的比特5、比特6。详细内容请参照“装置控制”一项。 0:通知无效 1:通知有效 |
| SlaveMotion通信周期 | 1、2、4、8、16、32 | 4 | 可选择通信周期。设为250us、500us时,请将“SlaveMotion同步选项”设为“1:通知有效”,从EtherCAT主局发布指令值更新的通知。更新通知使用Controlword的比特5、比特6。详细内容请参照“装置控制”一项。 |
| StationAlias设定 | 0~2 | 0 | 可选择启动时写入EtherCAT子局装置的Station Alias的方式。选择了“0:RC8”时,使用下述的“Station Alias编号”。选择了“1:EEPROM”时,使用写入配备在EtherCAT子局板(Motion)上的EEPROM中的值。EEPROM可从EtherCAT主局装置读写。 选择了“2:Unused”时,Station Alias的值为0。 0:RC8 1:EEPROM 2:Unused |
| StationAlias编号 | 0~65535 | 0 | 当“Station Alias设定”为“0:RC8”时,启动时该设定值被作为Station Alias的值写入。 |
ID : 2963