
ID : 2859
视觉跟踪的构成
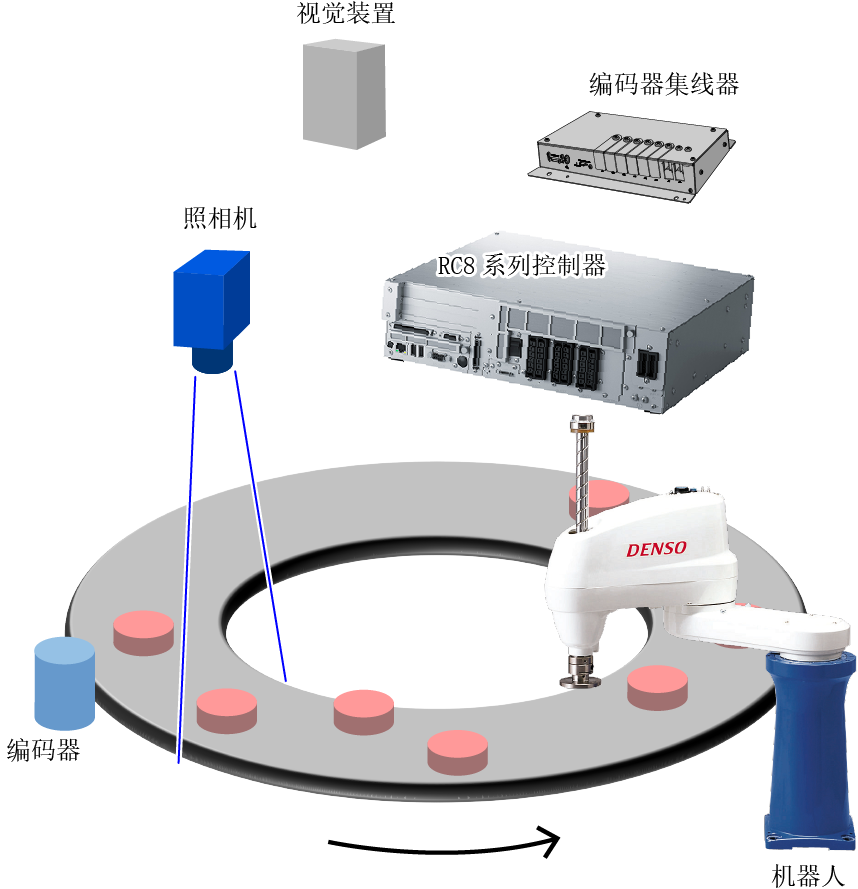
构成如下图所示。
挑选传送过来的放置在任意位置的工件时使用。
同时执行工件坐标识别和挑选这2个动作的程序。
工件的坐标识别程序的动作如下图所示。
视觉装置在接收到控制器发出的拍摄开始指令后开始拍摄,存在工件时会将位置信息发送至控制器。
视觉装置在开始拍摄的同时将开始的触发器信号发送至控制器。控制器接收到视觉装置发出的触发器信号后,通过编码器获取位置数据。
控制器以工件为单位保存视觉装置发出的工件位置信息和通过编码器获取的位置信息。
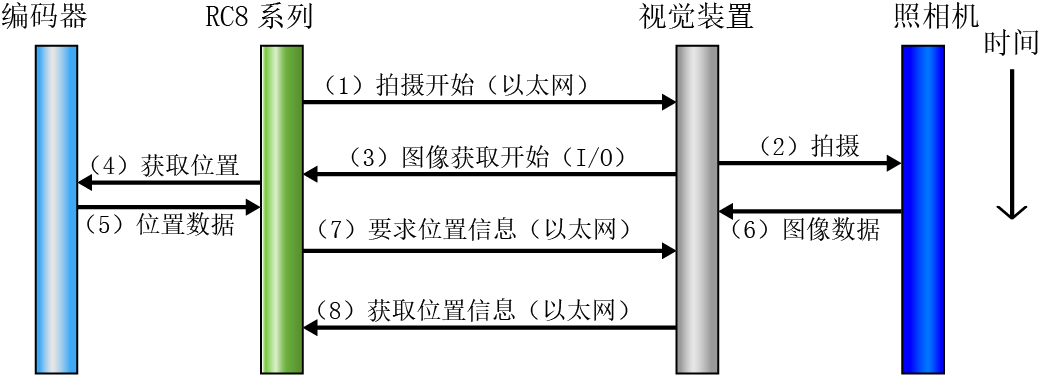
执行挑选程序时,读取保存的工件位置信息,机器人配合工件的移动一边移动机械臂一边进行挑选。
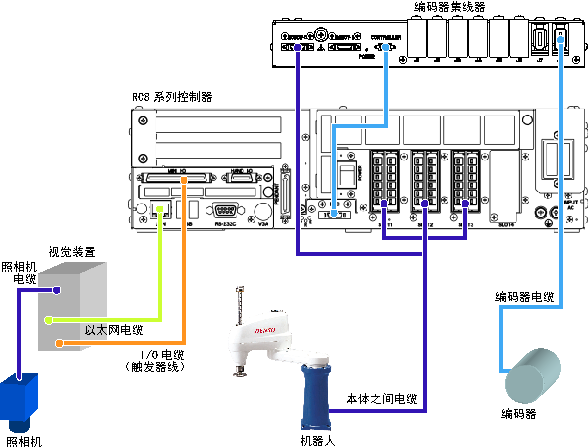
接线图
关于接线,请参照下图。
与编码器集线器接线时,请连接与编码器的轴编号对应的端口。
关于编码器集线器
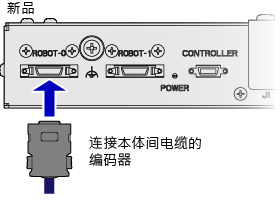
编码器集线器有旧件和新件。
使用新件时,请将本体间电缆的编码器线接在编码器集线器上刻有“ROBOT-0”字样的(从正面观察位于左侧)连接器上。
有关外形尺寸及设置上的注意,请参照“编码器集线器”。
ID : 2859