传送跟踪
功能概要
该功能使用传送带上流安装的传感器或相机,预先获取通过传送带传送过来的工件坐标,工件进入机器人的运行范围内后,配合工件的移动一边移动机械臂一边进行挑选。Ver.1.6.*及更高版本可使用该功能。
传送跟踪有以下2种。
传感器跟踪
使用光电传感器获取工件的坐标并进行挑选的功能。
挑选以任意间隔排成直线传送过来的工件时使用。

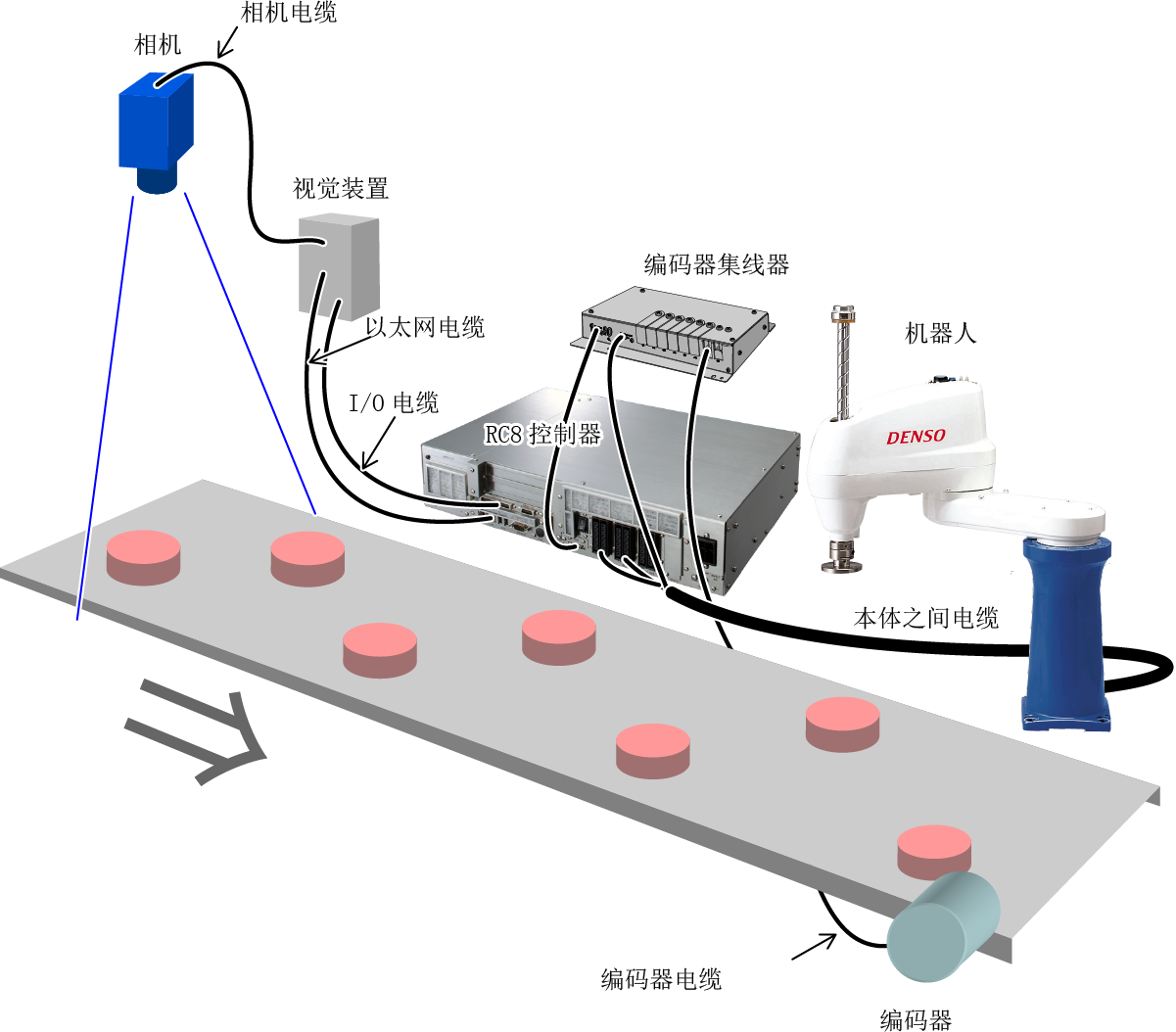
视觉跟踪
使用相机、视觉装置获取工件的坐标并进行挑选的功能。
挑选传送过来的放置在任意位置的工件时使用。
详细内容
关于详细内容,请参照“传送跟踪使用说明书”。
