
ID : 2216
视觉功能
功能概要
该功能向机器人提供通过相机读取的图像数据和从该处获取的工件位置及倾斜信息。根据图像数据进行工件检查,或根据工件位置和倾斜信息计算机器人的移动目标。
用于工件检查、传送跟踪、BinPicking等。
如下所示,与机器人控制器不同,包括使用图像处理专用控制器的“外部视觉”和在机器人控制器内进行图像处理的“内置视觉”。
备有PacScript专用指令,以使用视觉功能。
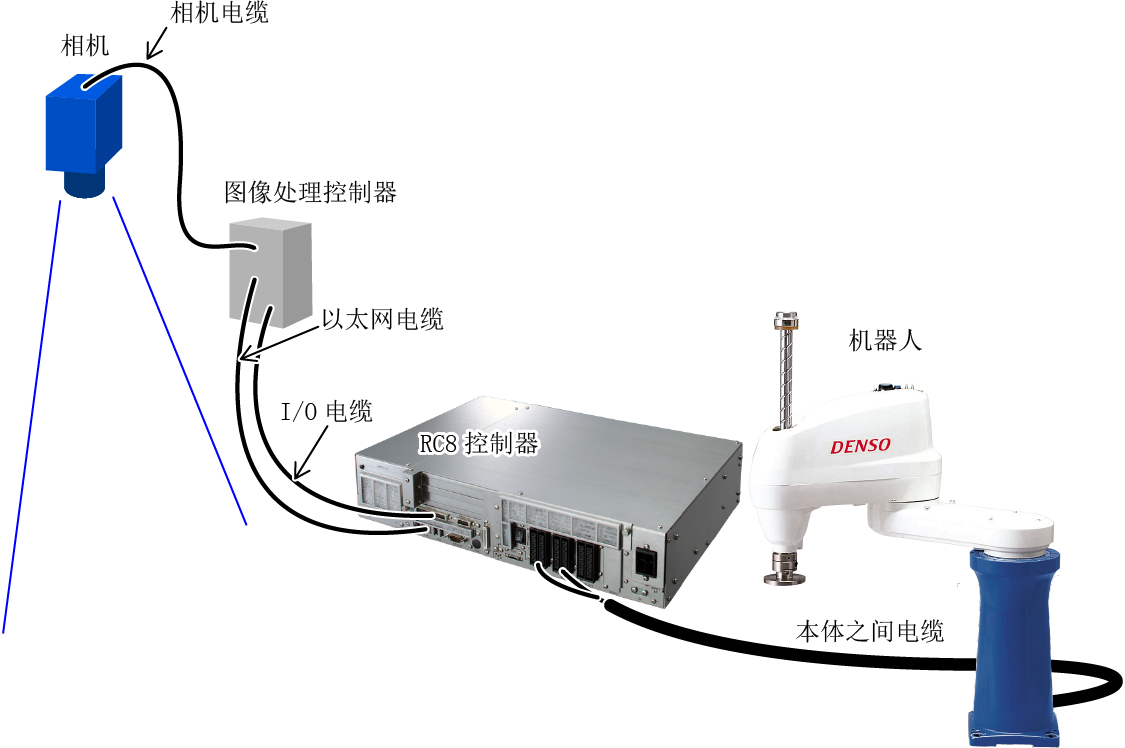
外部视觉的构成
将相机连接至图像处理控制器,并将图像处理控制器连接至机器人控制器。
关于可使用的图像处理控制器,请参照“外部功能指南”。
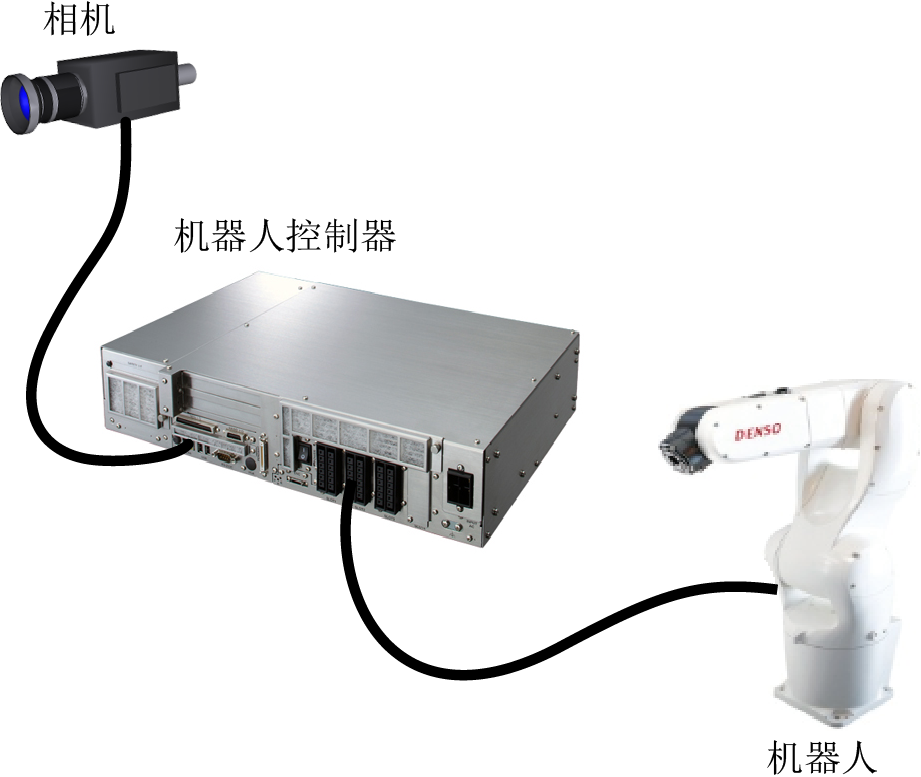
内置视觉的构成
直接将相机连接至机器人控制器。Ver.1.7.*及更高版本可使用该功能。
关于可使用的相机,请参照“内置功能指南”。
详细内容
关于外部视觉,请参照“外部视觉指南”。
关于内置视觉,请参照“内置视觉指南”。
ID : 2216