
ID : 1615
PTP控制
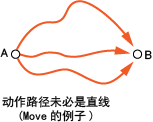
PTP(Point to Point)表示从点移动到点。移动的路径取决于机器人的姿势,并非全是直线运动。
下图表示PTP控制的动作示例。
通过动作控制指令指定插补方法时,如果指定“P”,则进行PTP动作。
在PTP动作目标位置指定P型、T型变量时,如果指定机器人形态,则将按照指定的机器人形态移动。
在机器人形态值中输入特殊值可自动选择最佳机器人形态。详细内容请参照“最佳Fig自动选择功能(Auto Fig)”。
ID : 1615
![]()
ID : 1615
PTP(Point to Point)表示从点移动到点。移动的路径取决于机器人的姿势,并非全是直线运动。
下图表示PTP控制的动作示例。
通过动作控制指令指定插补方法时,如果指定“P”,则进行PTP动作。
在PTP动作目标位置指定P型、T型变量时,如果指定机器人形态,则将按照指定的机器人形态移动。
在机器人形态值中输入特殊值可自动选择最佳机器人形态。详细内容请参照“最佳Fig自动选择功能(Auto Fig)”。
ID : 1615