
ID : 1530
X-Y模式(6轴机器人时)
在X-Y模式下,可以以基准坐标系(原点设定在机器人底部的中心)为基准移动机器人手臂。如果在X-Y模式下操作[X]键、[Y]键,或[Z]键时,则如下所示,机器人法兰分别沿着X轴、Y轴、或Z轴进行直线动作。
设定了工件坐标(原点设定在长方体包络面的角上)时,以工件坐标系为基准进行直线动作。
如果在X-Y模式下操作[RX]键、[RY]键、或[RZ]键,则如下所示,法兰面中心的位置不变化,机器人手臂在假想设定于法兰面中心的工件坐标系的各个轴周围进行旋转动作。
|
|
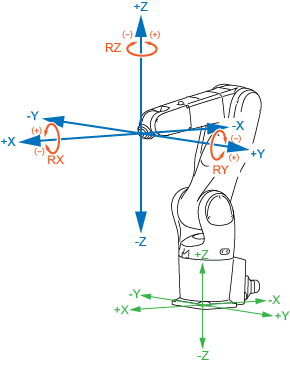
5轴机器人只有在法兰正确地与机器人XY平面平行(RX、RY为0度)时,才能保持固定的法兰姿势(法兰的三维朝向)。除此之外,法兰姿势不相同。
ID : 1530