机器人运行中(输出)
功能
将机器人正在运行(正在执行程序中1个以上的任务)的信号输出到外部。
使用方法
用于外部操作盘等的机器人运行过程中的指示灯显示。
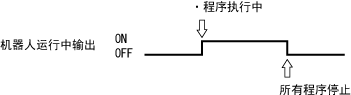
由于是用[所有程序停止]OFF,所以可以将停止的信号输出到外部。
ON条件
在程序执行中ON(条件分支、用定时器指令进行等待时也ON)。
但是,启动特权任务、操作盘任务时,该信号不为ON。
OFF条件
通过[所有程序停止]OFF。
所谓[停止所有程序],就是指多功能教导器、小型教导器的“机器人停止”、“STOP”按钮的操作及“瞬时停止(所有任务)”、“步骤停止(所有任务)”、“机器人停止”的输入。
状态图