
ID : 2686
スレーブコントロール設定
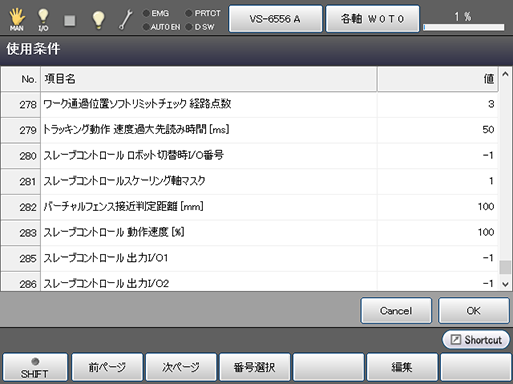
パラメータの設定は下記の画面で設定できます。
操作経路: [F2 アーム] - [F6 補助機能] - [F1 使用条件]
COBOTTAボタン設定
| 番号 | パラメータ名 | 初期値 | 内容 |
|---|---|---|---|
| 285 | スレーブコントロール 出力I/O1 |
無効 | COBOTTA のハンドプラスボタンを押した際に、ON/OFF を切り替えるI/O 番号を設定します。"-1" を設定した場合は無効になります。 |
| 286 | スレーブコントロール 出力I/O2 | 無効 | COBOTTA のハンドマイナスボタンを押した際に、ON/OFF を切り替えるI/O 番号を設定します。"-1" を設定した場合は無効になります。 |
その他設定
| 番号 | パラメータ名 | 初期値 | 内容 |
|---|---|---|---|
| 280 | スレーブコントロール ロボット切替時I/O番号 | -1 | 現在のロボットがスレーブロボットとして選択された場合に出力するI/Oを設定します。 "-1" を指定した場合は無効になります。 |
| 281 | スレーブコントロールスケーリング軸マスク | 1 | スレーブロボットの最大動作範囲に応じて、COBOTTAから送られてくる追従目標位置をスケーリングするかどうかを設定します。 |
| 282 | バーチャルフェンス接近判定距離[mm] | 100 | スレーブロボットがバーチャルフェンスに接近した際に、COBOTTA側で反力を発揮する機能をCOBOTTA側で有効化した場合に、バーチャルフェンスからどの程度離れたら接近検出するかの距離を設定します。 |
| 283 | スレーブコントロール 動作速度[%](*1) | 100 | スレーブロボットがマスタロボットに追従する際の動作速度を設定します。 追従速度が小さい場合、スレーブロボットの動作が不安定になり、正常に追従できない恐れがあります。 |
*1 : このパラメータは、COBOTTAとの接続中に値を変更しても設定は反映されません。COBOTTAと再接続したタイミングで反映されます。
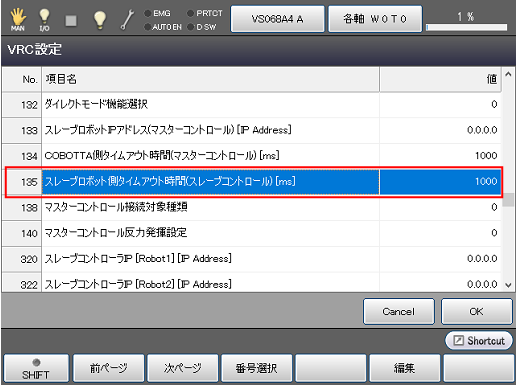
タイムアウト時間の設定
タイムアウト時間が極端に小さい場合、COBOTTAとの接続時にエラーが発生します。
接続前に、VRC設定画面から No.135[スレーブロボット側タイムアウト時間(スレーブコントロール)]の値を調整してください。推奨設定は、1000[ms]です。
[F6 VRC設定]の編集が行えるのは、メンテナでログインした場合のみです。
操作経路 : [F6 設定] - [F2 システム情報] - [F6 VRC設定]
ID : 2686