
ID : 7320
慢启动(SS)功能
功能概要
机器人停止一定时间后机器人动作时以低速动作的功能。
若在提前设定的时间内动作时变为低速,则经过设定时间后恢复为用户指定速度动作。
Ver.2.7.*及更高版本可使用该功能。
远程TP/虚拟TP中,当前参数设定状态可通过[帮助] - [参数确认] - [其他]选项进行确认。
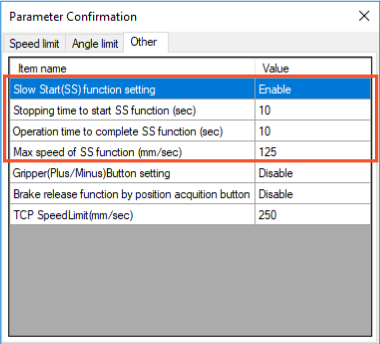
| 项目名 | 初始值 | 内容 |
|---|---|---|
慢启动功能有效设定 |
有效 | 设定使用(有效)、不使用(无效)本功能。 |
| SS开始之前的停止时间(秒) | 10 | 慢启动功能有效时,机器人停止时间超过设定时,机器人将以低速动作。 但是以下情况下无论设定时间如何,慢启动功能均有效。
在1~3600(秒)范围内设定。 |
SS完成之前的动作时间(秒) |
10 | 机器人以低速开始动作后超过设定的时间时,恢复至用户指定的速度后动作。 在1~3600(秒)范围内设定。 |
SS最大速度 (mm/sec) |
125 | 慢启动时的最大动作速度 在50~250[mm/sec]范围内设定。 |
设定方法
可通过COBOTTA参数工具变更各个参数。
设定参数时请进行风险评估后决定各个参数,以免作业人员的安全受损。
通过状态显示LED通知
一般情况下在用户程序执行中机器人本体的状态显示LED会亮白灯。
通过慢启动功能机器人低速动作时,状态显示LED的白灯会闪烁。
慢启动功能无效时
无论参数设定如何,以下情况下慢启动功能无效。
- 通过手动操作动作
- 通过变量移动操作
- 启动时执行CALSET时
- WINCAPSIII中的仿真功能
- 机器锁定运行
使用时的注意事项
即便使用本功能,也无法保证能避免人和机器人碰撞。执行用户程序时,请确认机器人附近没有人后执行。
请根据客户的设备环境设定各参数值。直接使用出厂时的设定值时,根据客户环境,作业人员和机器人可能碰撞。
ID : 7320