
ID : 7290
启动时的CALSET
本文就采用TP应用的CALSET实施方法进行说明。关于采用TP应用以外的CALSET实施方法,请参照“启动时的动作准备”。
采用TP应用的CALSET实施方法
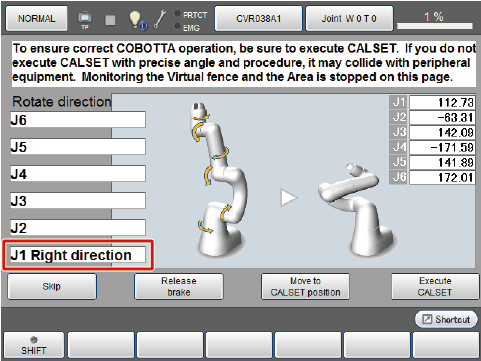
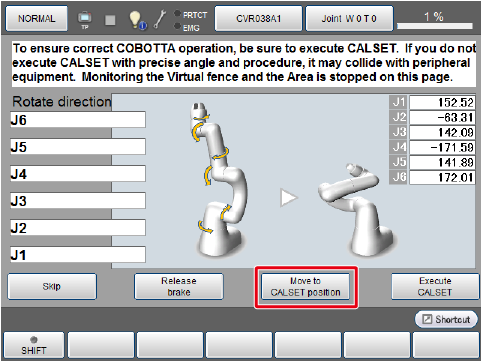
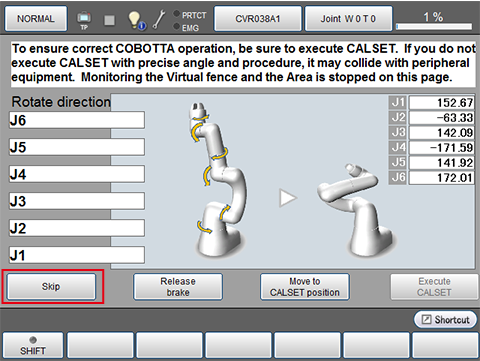
启动COBOTTA时,下图所示CALSET实施窗口会在TP应用上显示。
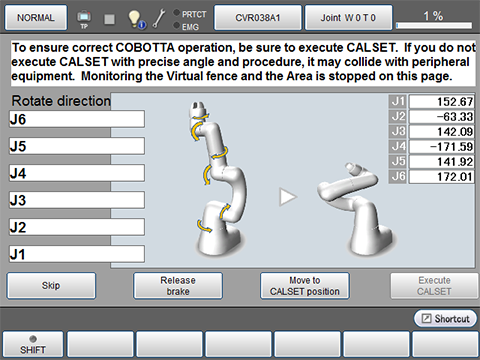
CALSET可按上图画面说明操作实施。但是,CALSET的实施方法大致可分2种,根据实施方法不同,上图画面上使用的按钮会有所不同。
实施CALSET时,需要使COBOTTA运行到CALSET位置(各轴的机械末端)。使COBOTTA运行到CALSET位置时,CALSET的实施方法可分为手动运行的方法和自动运行的方法。
各实施方法的步骤请参照以下内容。
另外,也可以不实施CALSET,关闭提醒CALSET的画面。关于步骤,请参照“跳过CALSET”。
- 未实施CALSET时,精度可能下降。
- [F6 设定] - [F3 教导器与操作盘] - [设定操作盘]的操作盘功能自动显示不可使用。
手动运行到CALSET位置时的步骤
1
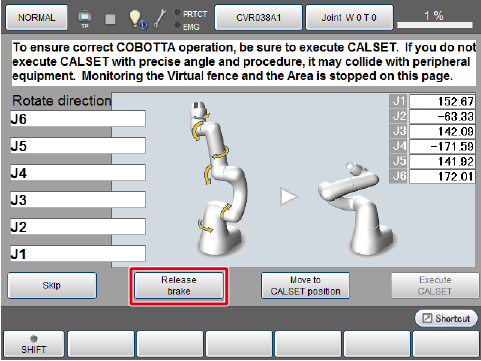
按压[制动器解除]按钮。
2
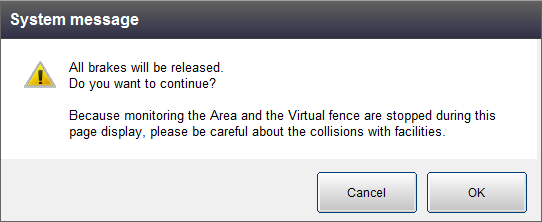
将显示制动器解除系统讯息,则按压[OK]。
3
在画面所显示的方向用手按压机械臂,将各轴移动到机械末端。
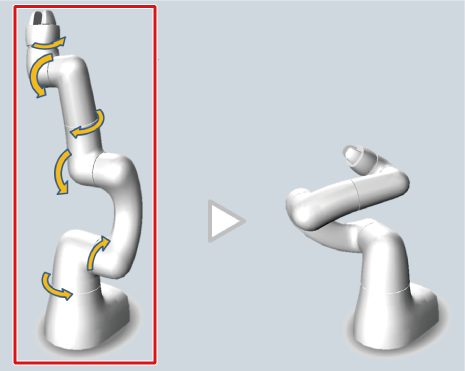
在正确方向移动时,则画面上显示“正确方向”。在反方向移动时,则画面上显示“反方向”。如果停止移动,该显示消失。
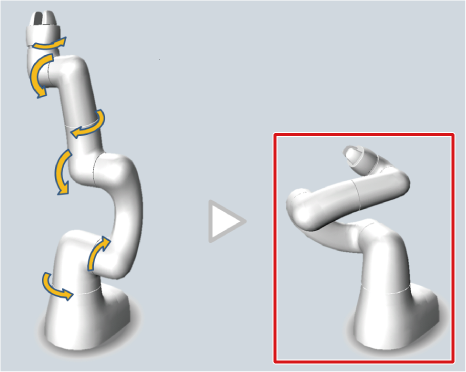
如果将全部轴移动到机械末端,COBOTTA则会变成显示在画面上的样子。另外,各轴的值变成接近下表的值。但是,由于存在个体差异,并不一定都会变成相同的值。
| 轴 | 值[deg] |
|---|---|
| J1 | 152.50000 |
| J2 | -62.88000 |
| J3 | 142.10000 |
| J4 | -176.50000 |
| J5 | 141.20000 |
| J6 | 177.00000 |
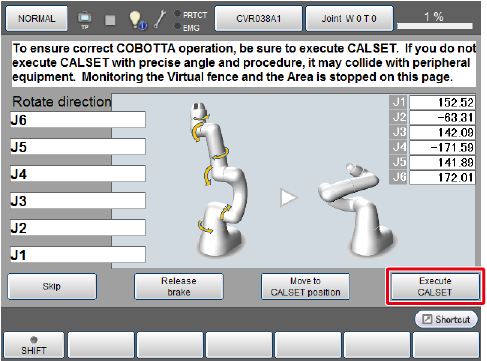
4
确认COBOTTA设定为正确的CALSET姿势,并按压[CALSET执行]按钮。
5
将显示全部轴执行CALSET的系统讯息,则按压[OK]。
在COBOTTA未设定成正确CALSET姿势的状态下,请不要按压[执行]→[OK]按钮。
否则会执行错误的CALSET,从而导致COBOTTA发生意外动作,或者是接触客户设备。
6
CALSET完成后,返回初始画面。
自动运行到CALSET位置时的步骤
- 请注意避免碰撞到外围设备。
- 请正确设定负载。
若未设定负载则可能发生“0x8440451* : *轴:位置偏差过大。”或不到达合适的CALSET位置且精度下降。
这种情况下请通过“使用条件”设定负载(No.1~No.7)重启或通过非TP应用执行CALSET。 - 自动运行到CALSET位置时,请勿施加外力。否则精度可能下降。
1
在COBOTTA的周围或COBOTTA本身有妨碍动作的物体时,请清除。另外,请将紧急停止开关设在可随手接触到的位置,以便能随时停止COBOTTA。
2
按[移动到CALSET位置]按钮。
3
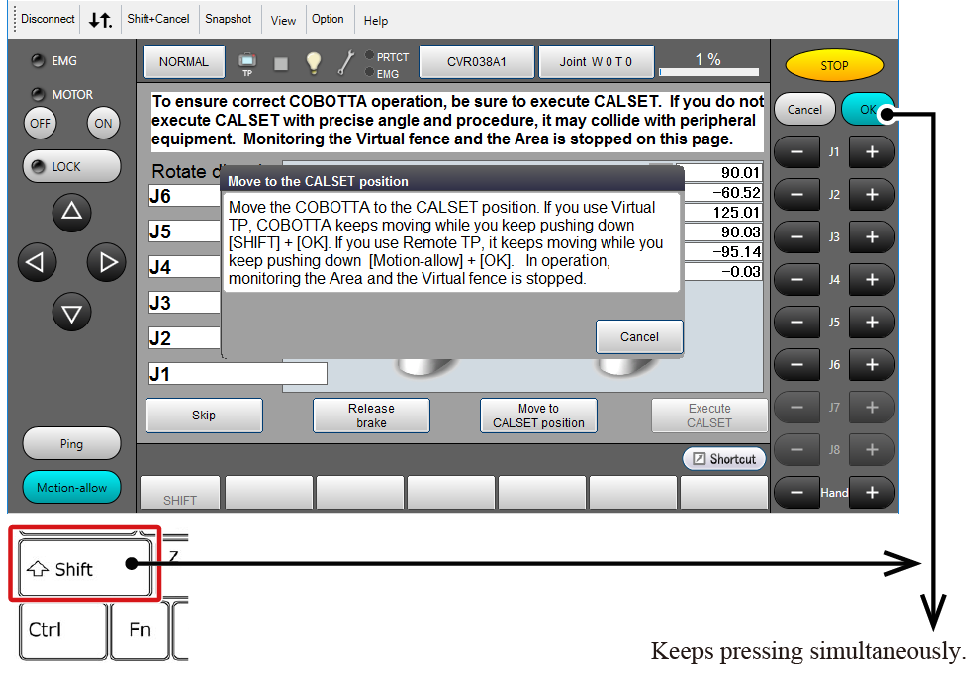
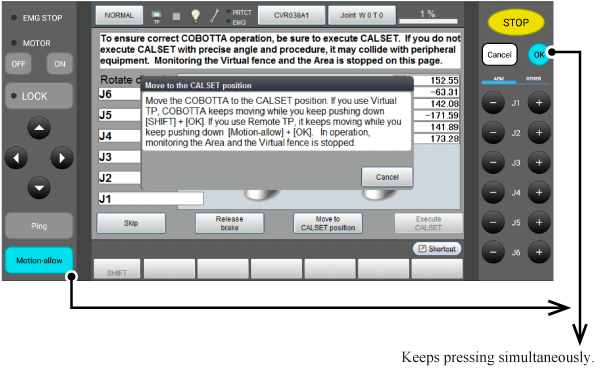
显示"运行到CALSET位置"视窗。虚拟TP和远程TP中要按压的按钮不同,因此请根据画面说明按压按钮。
如果释放某个按钮,则COBOTTA停止。
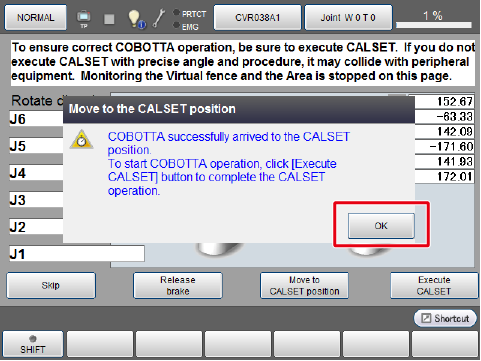
如果COBOTTA抵接到CALSET位置就会显示动作完成的讯息视窗,在此之前请一直按住按钮。
自动运行到CALSET位置期间可能发生意外动作。请勿进入机器人的可运行范围内。
虚拟TP画面
同时按压键盘的Shift键和虚拟TP的[OK]键期间动作。
远程TP画面
同时按压远程TP的[动作许可]键和[OK]键期间动作。
4
COBOTTA抵接到CALSET位置后,显示动作完成的讯息视窗。按下讯息视窗中的[OK]按钮,关闭讯息视窗。
5
按[CALSET执行]按钮。
6
将显示全部轴执行CALSET的系统讯息,则按压[OK]。
7
CALSET完成后,返回初始画面。
跳过CALSET
不执行CALSET,关闭提醒CALSET的画面时,按压[CALSET]。
ID : 7290