
ID : 7277
通过TP应用操作的方法
通过TP应用可实施诊断动作和编辑诊断动作角度等各种设定项目。
这里分以下项目说明上述内容。
诊断动作中可能发生意外动作。请勿进入机器人的可运行范围内。
诊断动作的实施方法
1
如果按照以下路径操作,则显示[诊断]视窗。
|
操作路径 : [F6 设定] – [F10 COBOTTA] – [F2 诊断] |
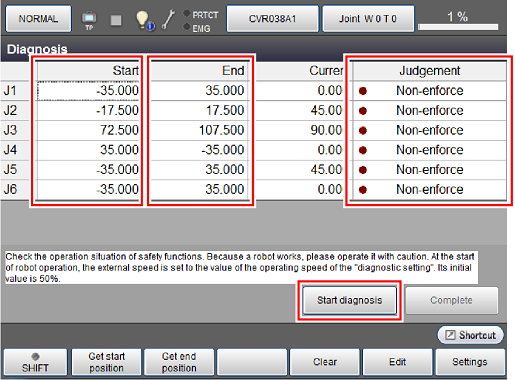
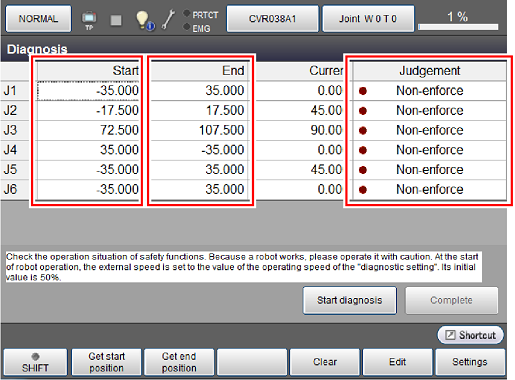
“开始位置”和“结束位置”设在动作角度超出诊断动作角度的位置。可变更“开始位置”和“结束位置”。变更方法请参照后文“设定项目的说明”。
“判定”中最初显示“未实施”。
2
按[诊断开始]按钮。显示说明下图所示操作方法的视窗。
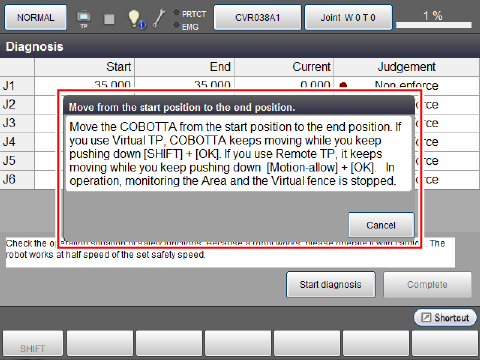
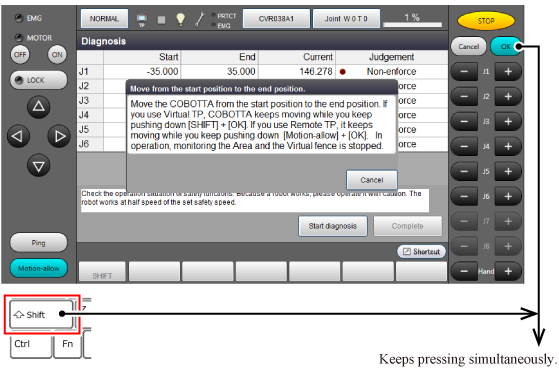
显示说明操作方法的视窗的状态下按下某个按钮,则开始诊断动作。按下的按钮不是虚拟TP和Remote TP。请参照下图。此外,关于按下的按钮,说明操作方法的视窗中也有记载。
诊断动作中可重复机器人微小动作和电机ON/OFF。
电机切换ON/OFF时会发出制动器解除音,这并非异常。请等到诊断完成。
虚拟TP画面同时按压键盘的Shift键和虚拟TP的[OK]键期间动作。
|
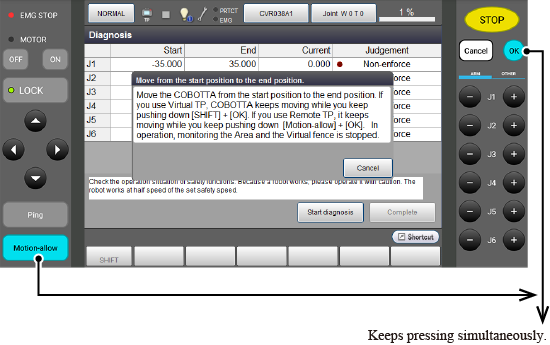
Remote TP画面同时按压远程TP的[动作许可]键和[OK]键期间动作。
|
3
开始诊断动作后,COBOTTA的各轴移动到“开始位置”,然后移动到“结束位置”为止。此时的外部速度在诊断动作设定开始时,按诊断设定中的“动作速度[%]”自动设定成自动的值。诊断设定中的“动作速度[%]”初始值为50%。可变更此时的速度(相对于最高速度的百分比)。请参照后文“设定参数”。
移动到结束位置后会显示下图所示结束消息,因此请在此之前长按按钮。如果释放某个按钮,则COBOTTA停止。
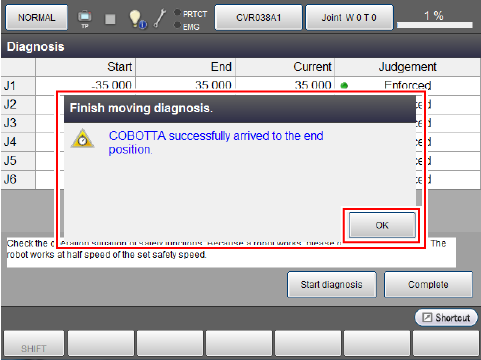
4
按下结束消息中的[OK]按钮,关闭结束消息。
若[诊断]视窗的“判定”内容在所有轴上都显示“已实施”,则COBOTTA的位置检测功能和速度检测功能正常。
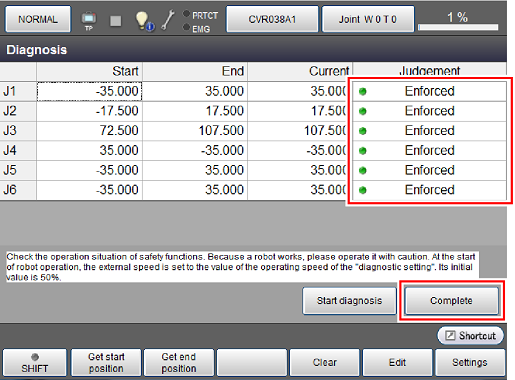
按下[完成]按钮,关闭[诊断]视窗。
由此诊断动作结束。
设定项目的说明
使用[诊断]视窗的功能键可以变更“开始位置”或“结束位置”、设定参数。
| 功能键说明 | |
|---|---|
| [F1 获取开始位置] | 将当前COBOTTA位置作为诊断动作的开始位置进行覆盖(覆盖1轴~6轴的所有轴)。 |
| [F2 获取结束位置] | 将当前COBOTTA位置作为诊断动作的结束位置进行覆盖(覆盖1轴~6轴的所有轴)。 |
| [F4 清空] | 将所有轴的“判定”内容设为“未实施”。 |
| [F5 编辑] | 光标放在“开始位置”或“结束位置”的任意轴时编辑其设定值。 |
| [F6 设定] | 打开诊断动作相关参数的设定视窗。请参照后文“设定参数”。 |
变更“开始位置”或“结束位置”后,会检查从“开始位置”到“结束位置”的动作角度。如有动作角度小于诊断动作角度的轴,则会显示下图所示系统消息且该轴的角度值会显示红色。在此状态下即便实施诊断动作“判定”也不会变为“已实施”。
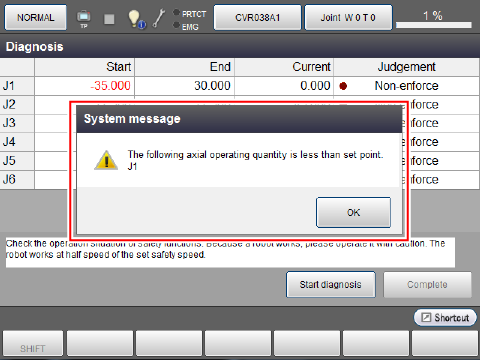
变更“开始位置”或“结束位置”时,请务必确认动作角度大于以下诊断动作角度。
| 轴 | 诊断动作角度 |
|---|---|
| 1轴 | 70° |
| 2轴 | 35° |
| 3轴 | |
| 4轴 | 70° |
| 5轴 | |
| 6轴 |
设定参数
如果按压[诊断]视窗的[F6 设定],则显示下图所示[诊断设定]视窗。
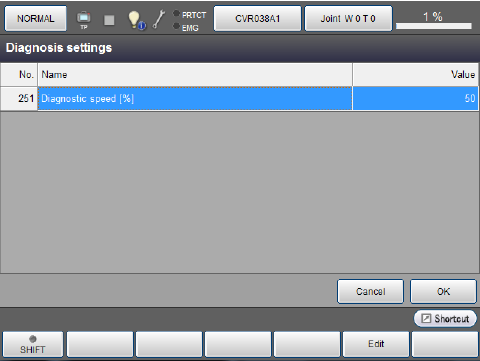
参数内容如下所示。
| 设定参数 | 值 |
|---|---|
| 251 : 动作速度[%] |
执行诊断动作时的COBOTTA的动作速度。设定与最大速度之比。 |
ID : 7277