
ID : 7193
校准步骤
1
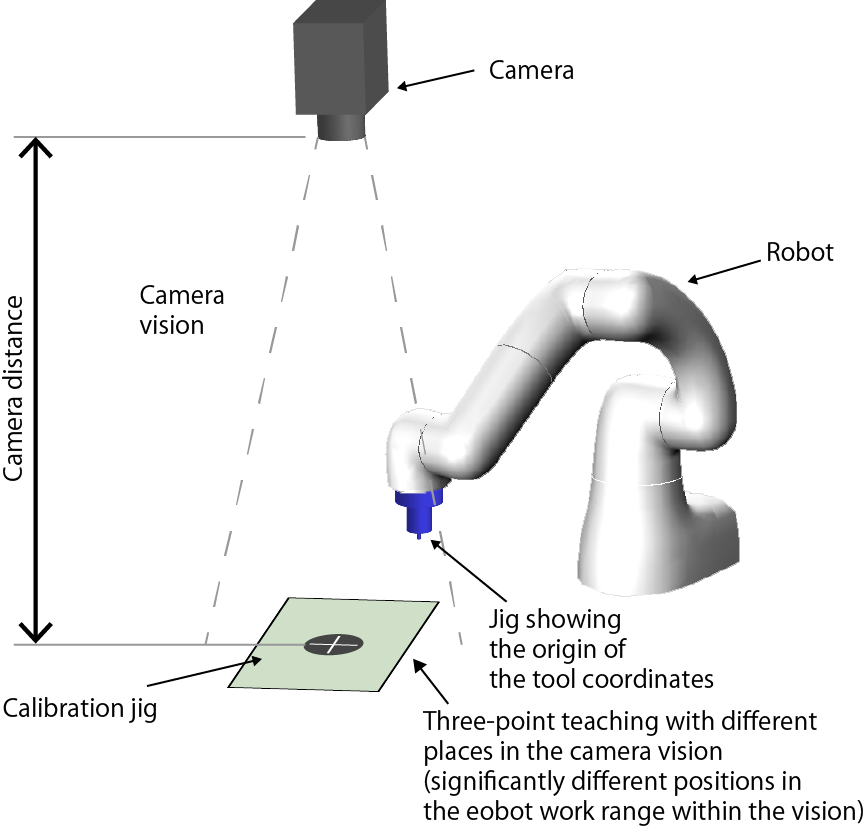
事前进行以下准备。
- 为了更准确的教导工具定义的原点位置,需要准备表示工具原点的治具。
- 准备视觉装置中可识别的1个标记的校准治具。
- 如下图所示,按照与实际作业相同识别的相机距离、视野尺寸进行配线。
2 注册Point1的视觉坐标
注册Point1的视觉坐标。注册方法有2种。
2-1 视觉坐标的手动输入
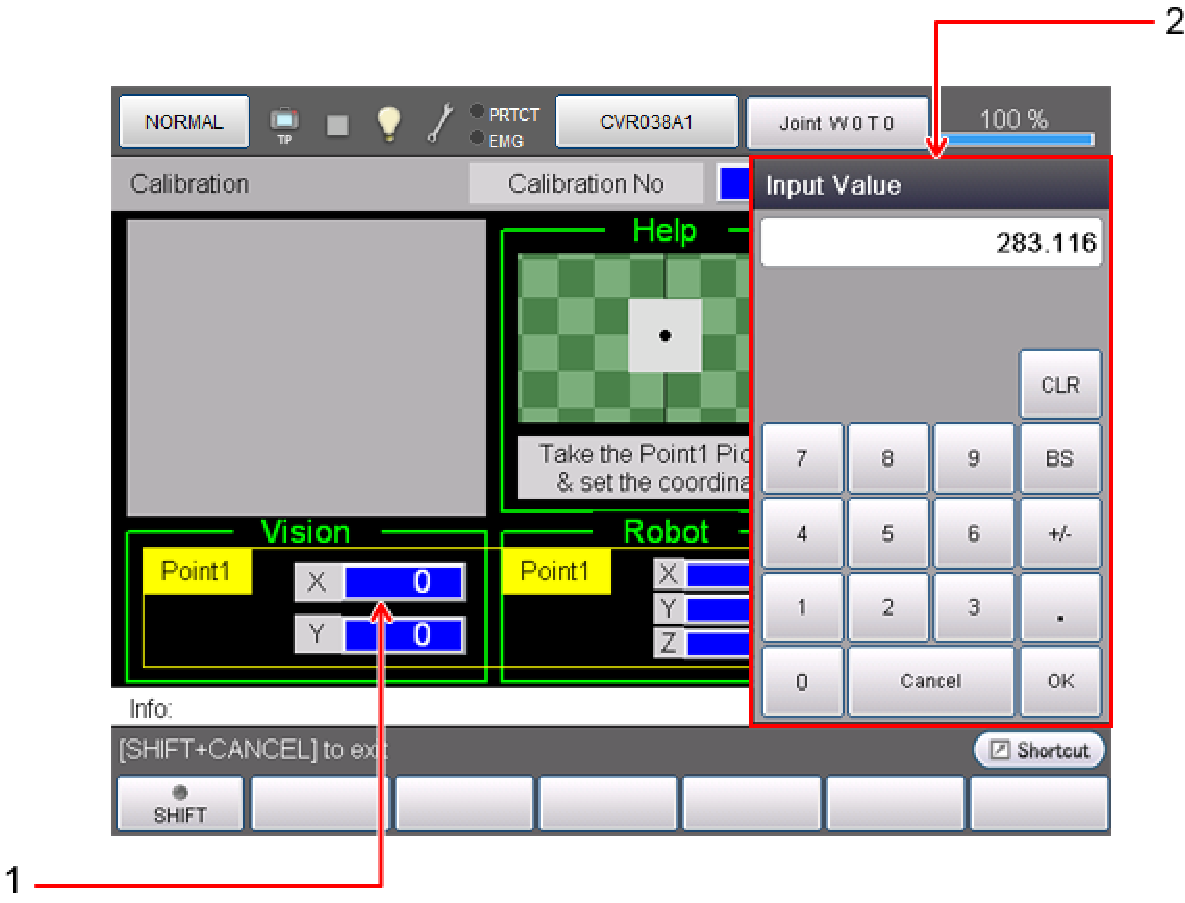
使用相机拍摄Point1,读取坐标。按照以下步骤输入读取的坐标。
如果触摸1的坐标部分,则显示2的数值输入画面。输入视觉装置中读取的视觉坐标(X,Y),按下[OK]按钮。
2-2 视觉坐标的自动输入
使用对应机型的视觉装置时,可自动输入标记的重心位置的视觉坐标。
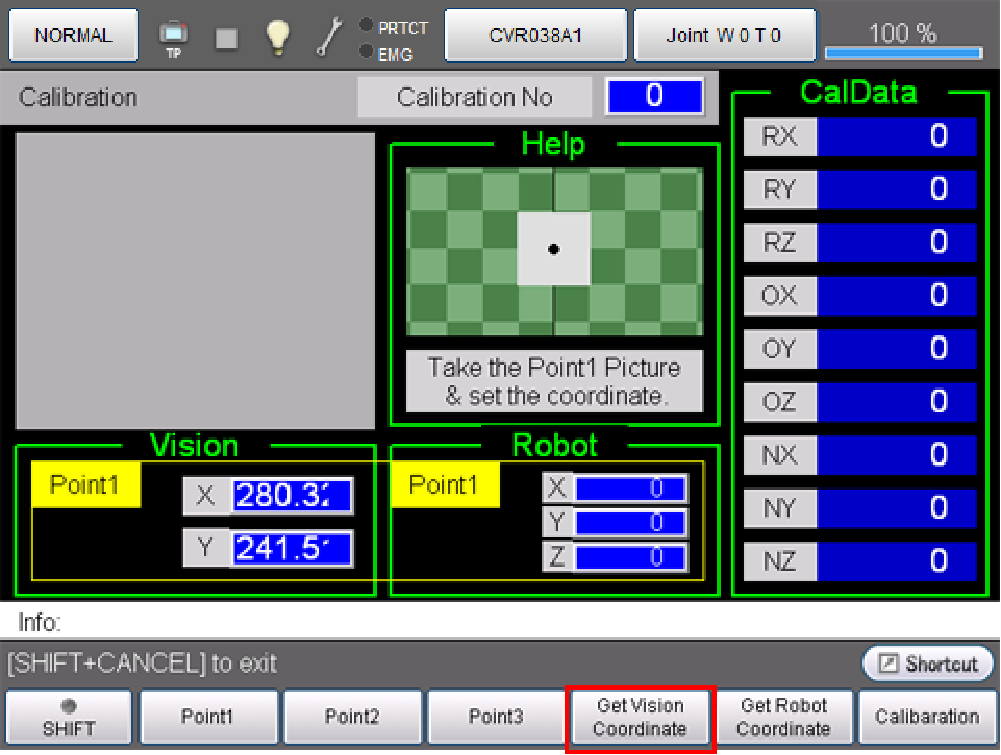
起动视觉程序和机器人程序(TSR10.pcs)的状态下,如果按下[Get Vision Coordinate]按钮,则读取标记的重心位置,自动获取视觉坐标。
获取的结果显示在Vision视窗。
3 注册Point1的机器人坐标
读取视觉坐标的治具不动,移动机器人,使机器人的工具原点与标记的重心位置保持一致,读取并注册机器人坐标。
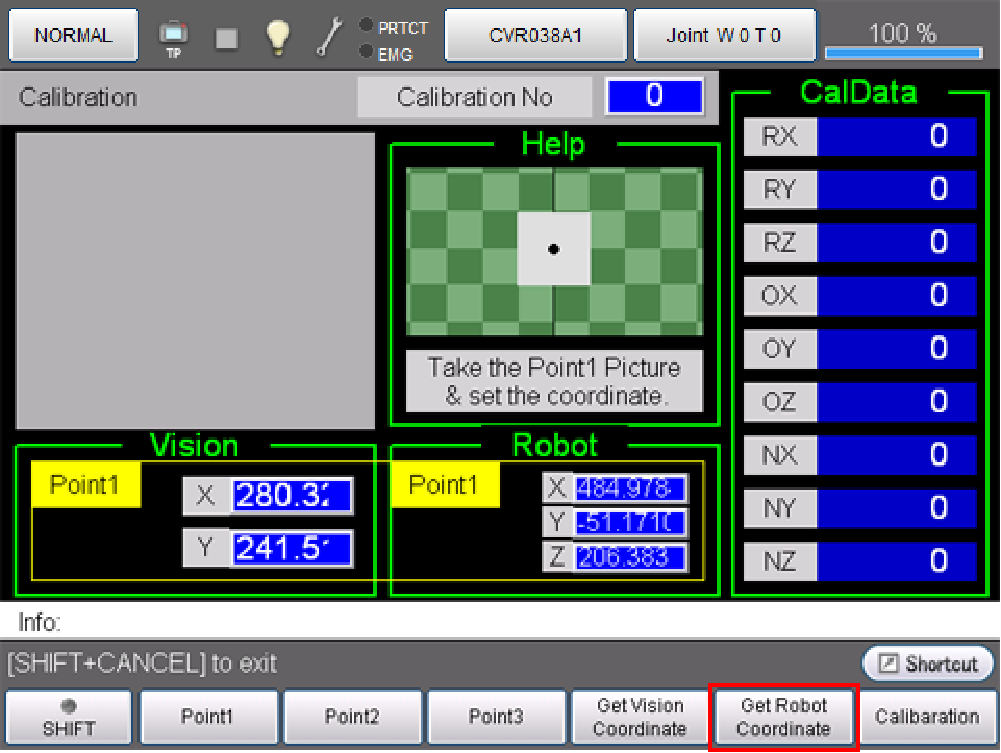
如果按下[Get Robot Coordinate]按钮,可读取机器人坐标,并显示在Robot视窗。
4 注册Point2的坐标
更改治具的位置,注册Point2的视觉坐标、机器人坐标。
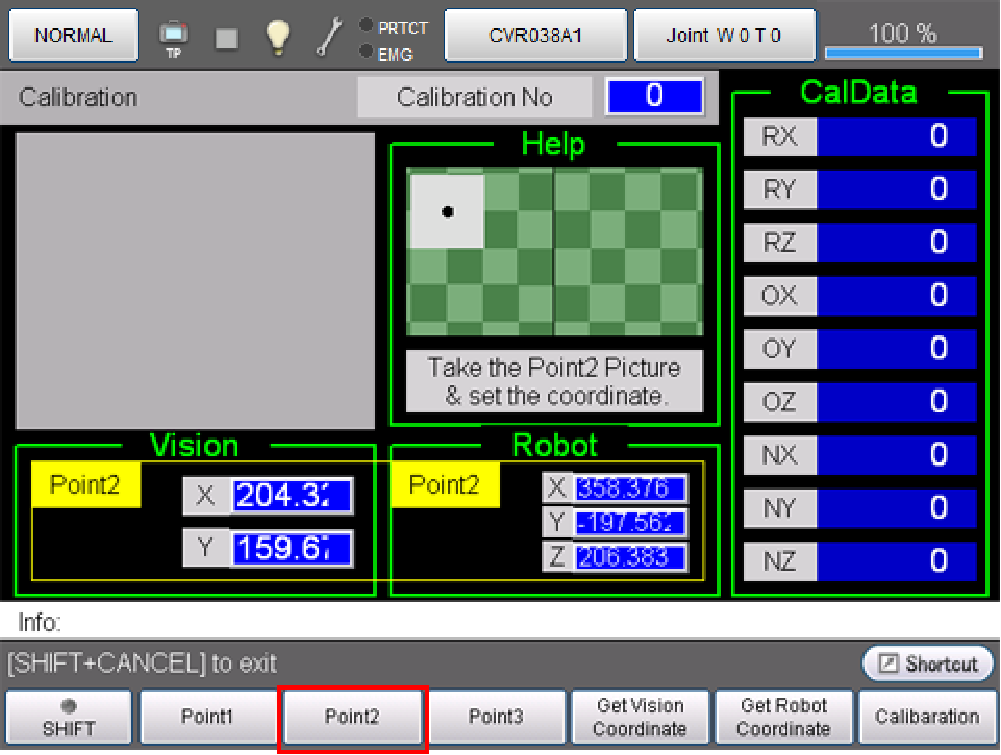
如果按下[Point 2]按钮,可注册第2处的视觉坐标、机器人坐标。
按照与Point 1相同的方式注册。
5 注册Point 3的坐标
同样,更改治具的位置,注册Point 3的视觉坐标及机器人坐标。
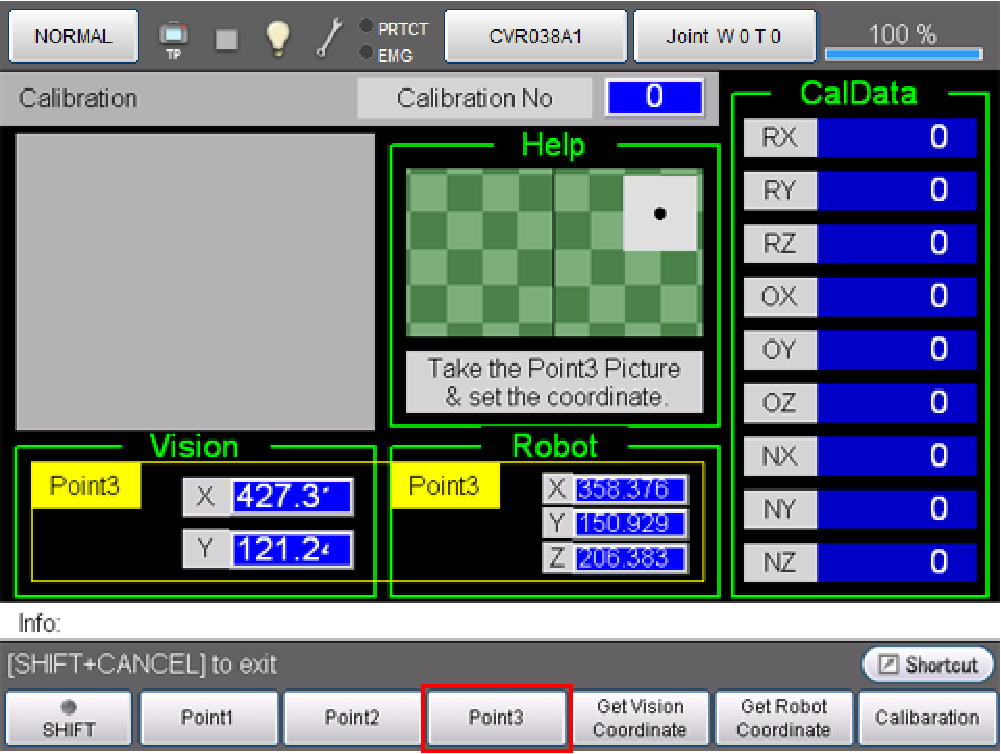
如果按下[Point 3]按钮,可注册第3处的视觉坐标、机器人坐标。
按照与Point 1相同的方式注册。
6 校准数据的计算
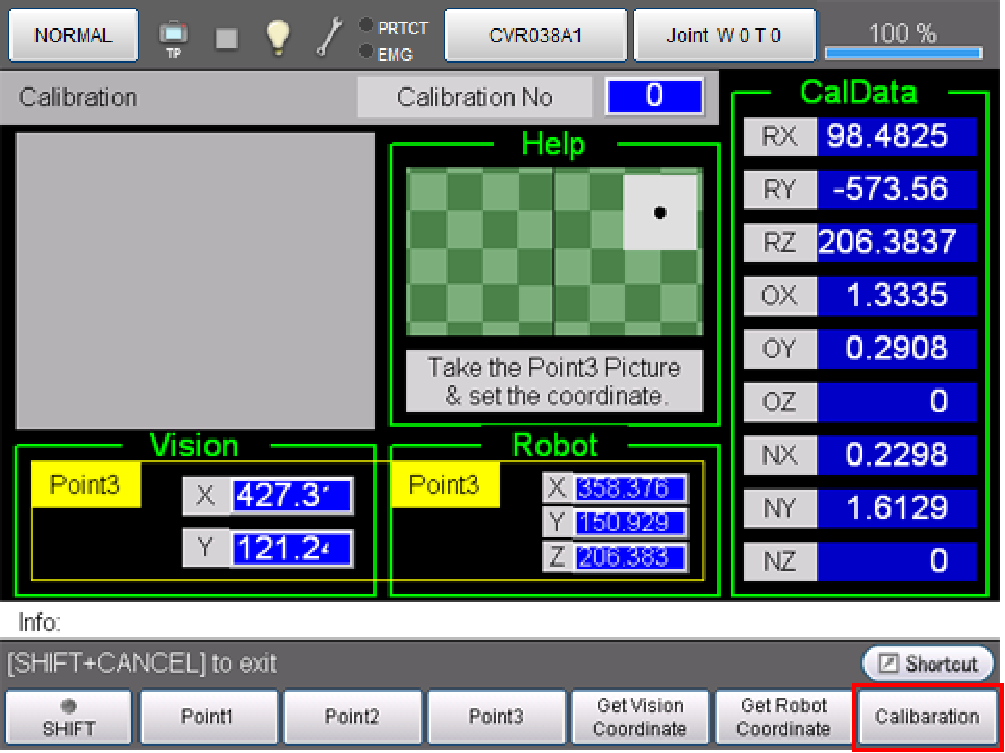
如果按下[Calibration]按钮,则根据注册的点1~3的数据计算CalData,并在CalData中显示结果。
在结果确认画面中也可确认CalData的计算结果。
另外,可将其它校准结果注册至Calibration No 0~31。
7 校准数据的保存
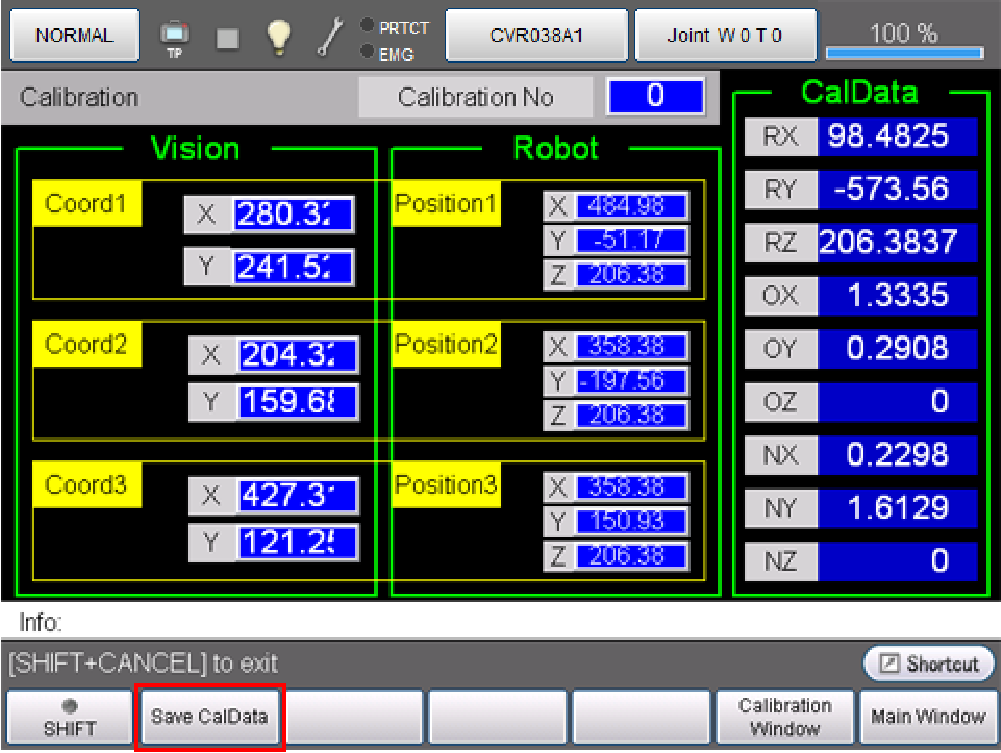
为保存校准结果,需切换至结果画面,按下[Save CalData]按钮。
至此校准作业结束。
如果不执行该保存操作,则不执行CalData的保存。
ID : 7193