
ID : 7191
使用操作盘进行视觉校准的步骤
此处就利用操作盘备有COBOTTA和视觉装置间的“视觉-机器人坐标校准”进行简单操作的步骤进行说明。
利用校准用操作盘时,需导入至使用的COBOTTA。
导入方法请参照WINCAPSIII指南的“使用已有程序”。
准备
- 请将下表中链接所示的机器人程序和BMP文件导入您所使用的COBOTTA。
- 使用以下4个公司的视觉装置时,可通过重心检测的自动输入使用视觉坐标的输入。
其它视觉装置时,可通过手动输入使用视觉坐标。
为支持的视觉装置时,请从下表中的链接地址复制用于从视觉装置接收数据的机器人程序(TSR10.pcs)和各公司的视觉程序,将机器人程序导入COBOTTA,视觉程序导入各公司的视觉装置。
起动机器人程序(TSR10.pcs)后,启动操作盘。
公司名称 产品 数据 KEYENCE XG系列 inspect.dat (DAT:7KB)
TSR10.pcs (PCS:969B)OMRON FZ系列 calibration.scn (SCN:6KB)
TSR10.pcs (PCS:875B)COGNEX In-Sight系列 3PointCal.job (JOB:47KB)
TSR10.pcs (PCS:2KB)PANASONIC设备SUNX PV系列 Set00.PV2 (PV2:126KB)
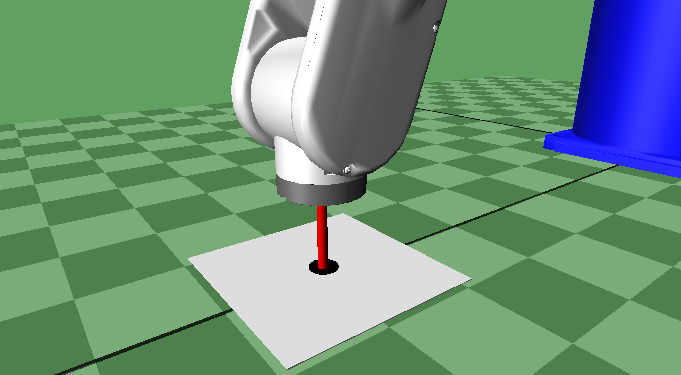
TSR10.pcs (PCS:1,004B) - 请准备校准用治具(已印刷标记)。
在视觉程序中求取圆的重心位置。为使重心位置与机器人的工具位置容易重合,请在重心位置准备带十字的标记(参考下图)。
标记示例 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
ID : 7191