
ID : 7004
最佳速度控制功能
将机器人动作时的速度和加速度自动调整为最佳状态的功能。
此功能可选择有效/无效。
若不将此功能设为有效,则根据机器人的动作,可能容易发生错误(默认设定变为有效)。
设定有效/无效时,可按机器人的动作种类(PTP动作/CP动作)设定。
作为设定方法,从提前准备的4种模式选择。
以下项目说明模式的内容、各设定的特征。
请参考上述项目设定最佳速度控制功能的模式。
最佳速度控制模式功能的模式一览
最佳速度控制模式功能包括以下4种模式。
| 模式 | 最佳速度控制功能有效/无效 | |
|---|---|---|
| PTP动作时 | CP动作时 | |
| 3 |
有效 |
有效 |
| 2 |
无效 |
|
| 1 |
有效 |
无效 |
| 0 |
无效 |
|
默认设定为模式3。
PTP动作有效/无效设定的特征
有效时
-
即便将最佳速度控制功能设为有效,机器人动作中也可能发生错误。表示发生以下最佳速度控制功能相关错误时的应对方法。
动作中可能发生过载错误。这种情况下请设定定时器和内部速度、加速度后调整电机负荷。此外,关于电机负荷的状况可在远程TP/虚拟TP上进行确认。请参照“伺服状态显示”。
动作中可能发生偏差过大错误。此时,请调整速度、加速度。
- 与设为无效相比,PTP动作时的动作时间可能延长。
无效时
- 与设为有效相比,PTP动作时容易发生错误。
CP动作有效/无效设定的特征
有效时
-
即便将最佳速度控制功能设为有效,机器人动作中也可能发生错误。表示发生以下最佳速度控制功能相关错误时的应对方法。
动作中可能发生过载错误。这种情况下请设定定时器和内部速度、加速度后调整电机负荷。此外,关于电机负荷的状况可在远程TP/虚拟TP上进行确认。请参照“伺服状态显示”。
动作时可能发生指令加速度超限错误、偏差过大错误、指令速度过大错误。这种情况下,通过内部速度、内部加速度调整速度、加速度。
- 高速动作时可能发生最大5mm左右的轨迹偏离。动作附近有障碍物时,请降低速度后使用。
- 在特异点附近速度降低动作中瞬时停止时,可能延长瞬时停止时间。但是,瞬时停止距离不变。
- 即便机器人的动作速度在梯形类型的等速区间内,速度也可能变化。
- 与设为无效相比,CP动作时机器人的动作时间可能延长。
无效时
- 与设为有效相比,CP动作时容易发生错误。
- 机器人的动作速度在梯形类型的等速区间内会保持在一定的速度。
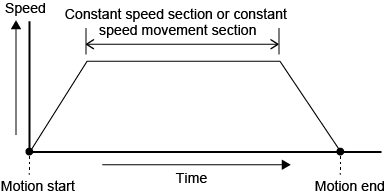
关于梯形类型
机器人速度的控制方法包括根据梯形类型的控制方法。机器人开始动作时缓慢提高速度,到达一定速度之前,会保持该速度进行动作。动作结束时慢慢降低速度并最终停止。
将保持速度动作的区间称为“等速区间”或“等速移动区间”。
模式的选择步骤
若在默认模式下不能顺利动作,则设定为其他模式。
例如,PTP动作没有问题,但CP动作时希望保持一定等速区间速度时。
这种情况下,按各动作种类应选择的有效/无效如下所示:
|
PTP动作 |
有效 |
|---|---|
|
CP动作 |
无效 |
从模式一览中选择满足上述条件的模式。这种情况下为模式1。
ID : 7004
- 本页相关信息
- 设定所需的使用条件
- 设定时
- 最佳速度控制功能的设定方法