
ID : 6958
功能说明
监视对象
可将以下项目设为监视对象。
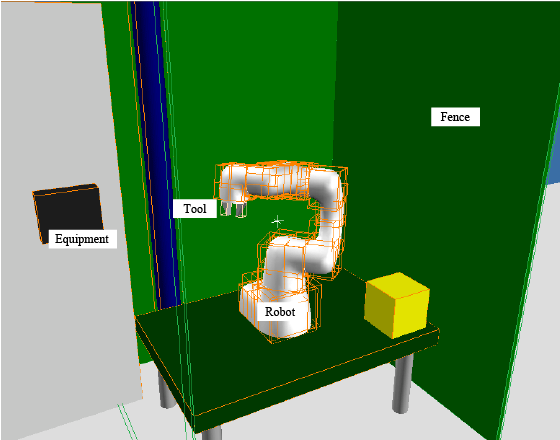
- 机器人、设备(包括栅栏)、工具
可在参数中选择组合。
·机器人与设备(包括栅栏)
・机器人与工具
·工具与设备(包括栅栏) - 当前值、指令位置、目标位置
可在参数中设定。
可同时监视全部。
当模型数多,处理时间太长时,可减少模型数,取消参数的勾选,缩短处理时间。
此时,请勾选当前值、指令位置、目标位置之一。
模型化的方法
在该功能中,可以使用WINCAPSIII中的简易建模功能,将监视对象工具及设备设成任意形状。
另外,还可设定外部的设备数据。
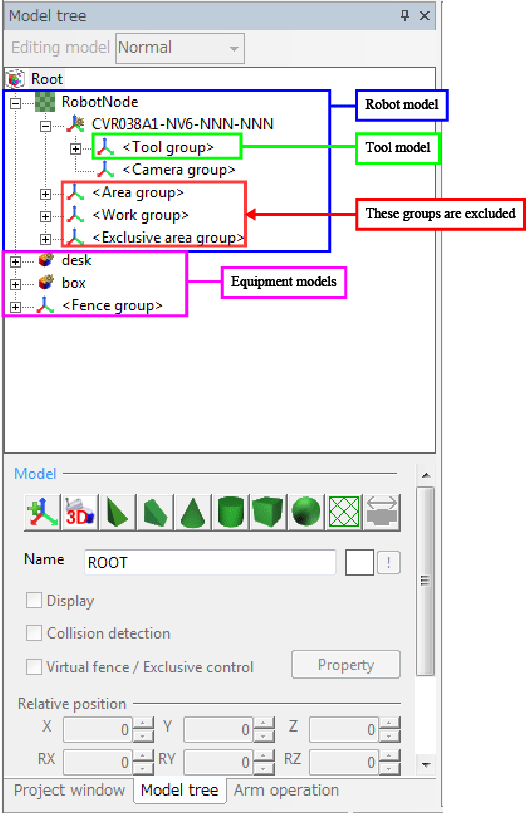
监视模型创建时的制约
请在指定的层级创建各监视模型。
| 监视模型名 | 制约 | 详细 |
|---|---|---|
| 机器人模型 | 在Robot Node以下,除工具组、区域组、工件组、排他组以下的对象。 | - |
| 工具模型 | 工具组以下的对象。 | 工具编号以下的工具模型在工具编号变更后有效。 工具组正下方的工具模型与工具编号无关监视。 |
| 设备模型 | 位于Root正下方,除Robot Node外的对象。 | - |
ID : 6958