
ID : 4183
“机械臂”菜单
项目说明
当前位置显示
通过变量(P型、J型、T型、J-EX型)的值在“机械臂3D视图”中显示当前机械臂的位置。另外,该值可进行复制。
工具坐标系监视器
“机械臂3D视图”中打开/关闭当前工具编号和坐标轴的显示。
工件坐标系监视器
“机械臂3D视图”中打开/关闭当前工件编号和坐标轴的显示。
基础坐标系监视器
“机械臂3D视图”中打开/关闭当前的基础坐标轴的显示。
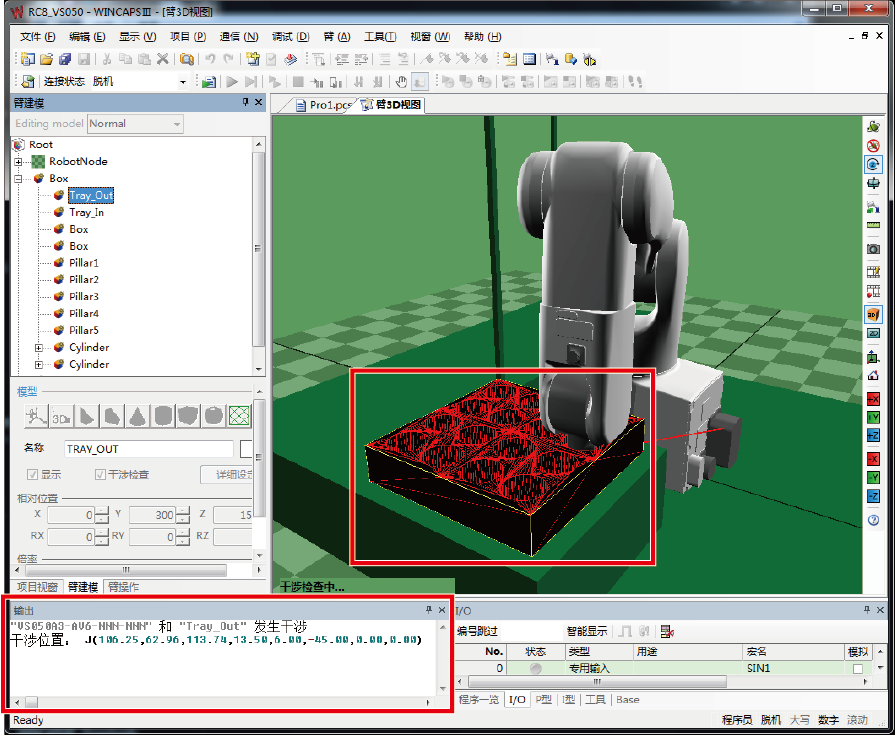
干涉检查
打开/关闭干涉检查。
ON中检测到干涉时,臂3D视图画面的干涉目标颜色会发生翻转,并在输出画面中显示位置信息。
同时,虚拟栅栏/排他控制中的干涉会使监视模型的线框颜色发生翻转。
干涉显示复位
将干涉检查的显示返回至最初状态。
虚拟栅栏/排他控制数据输出
将虚拟栅栏数据或者排他控制数据输出到项目文件夹。
虚拟栅栏/排他控制数据自动输出
在保存项目或将数据发送给COBOTTA时,自动输出虚拟栅栏数据或者排他控制数据。
虚拟栅栏/排他控制数据显示
在机械臂3D画面上显示虚拟栅栏数据或者排他控制的数据。
动作记录
设定机器人动作轨迹的显示。
显示/不显示
切换是否在“臂3D视图”中显示地面、机械臂、工具、工件、区域、障碍物。
ID : 4183