
ID : 4162
动作模式选择画面的显示、变更
操作路径:远程TP/虚拟TP的[M-MOD]键
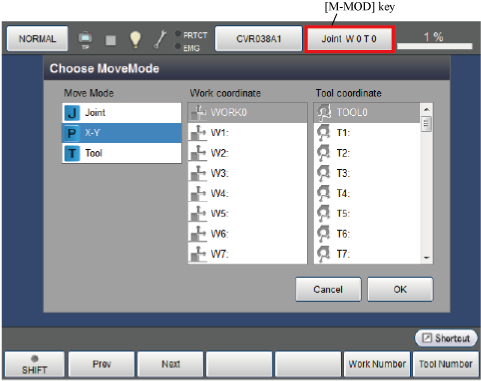
如果按压远程TP/虚拟TP的[M-MOD]键,则显示以下[运行模式选择]视窗。
使用远程TP/虚拟TP的上下左右光标键选择需要设定的“运行模式”、“工件坐标系”、“工具坐标系”的各个项目。也可直接触摸画面进行选择。
选择后按压[OK]即完成变更。
当前选择的动作模式在速度栏的左侧显示。
| 功能键以外的键 | |
|---|---|
| [J]各轴 | 可分别对各轴进行操作。 |
| [P]X-Y | 以基准坐标系及工件坐标系为基准,可运行机器人。 |
| [T]TOOL | 以工具坐标系为基准,可运行机器人。 |
| 可使用的功能键 | |
|---|---|
| [F1 上一页] | 显示当前选择位置的上一页。 |
| [F2 下一页] | 显示当前选择位置的下一页。 |
| [F5 Work编号] |
可选择工件坐标系编号。 使用数字键输入使用的工件坐标系编号后按压[OK],则选择编号。 |
| [F6 Tool编号] | 使用数字键输入使用的工具坐标系编号后按压[OK],则选择编号。 |
ID : 4162