
ID : 7892
お客様オリジナルフィンガを使用する場合(COBOTTA用電動グリッパとAFカメラ(N10-W02)の組合せ)
ここでは、COBOTTA用電動グリッパから標準フィンガを取り除いた部分を"標準フィンガ除外グリッパ"と呼ぶこととします。
また、標準フィンガ除外グリッパを含む、フランジに負荷をかけるもの(ワークや配線、配管など)をツール関連部分としています 。AFカメラ(N10-W02)はツール関連部分に含めません。
COBOTTA用電動グリッパを使用する場合、下記事項の許容範囲を確認する必要があります。
COBOTTA用電動グリッパに工場出荷時に組付いているフィンガを"標準フィンガ"と呼びます。
ツール関連部分の総質量の許容範囲
ツール関連部分の総質量は、下記質量の範囲内にしてください。
なお、ツール関連部分の総質量を計算する際には、標準フィンガ除外グリッパの質量(0.184 kg)を足してください。
-
COBOTTAの手先が下向き(±10 °以内)の場合
0.55 kg まで
-
上記以外の場合
0.35 kg まで
ツール関連部分の重心位置の許容範囲
下図は、6軸回転中心と5軸回転中心の交点から、ツール関連部分の重心位置までの距離の許容範囲を、ツール関連部分の総質量別に示した図です。
ツール関連部分の総質量を計算する際には、標準フィンガ除外グリッパの質量(0.184 kg)を足してください。
また、ツール関連部分の重心位置を算出する際は、標準フィンガ除外グリッパも含めて算出してください。
標準フィンガ除外グリッパの重心位置は、6軸の回転中心線上を、5軸回転中心から57.7mm離れた場所にあります。
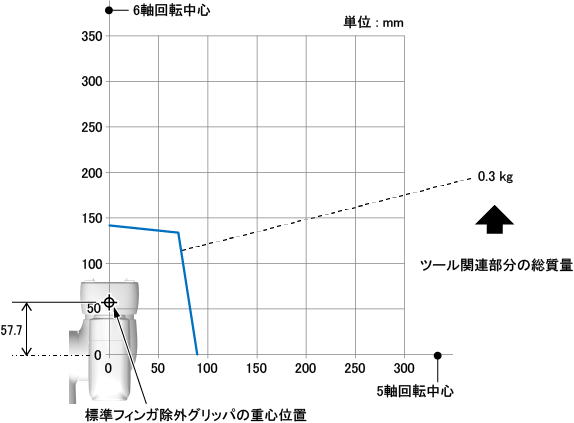
ツール関連部分の重心位置は、上図の範囲内にしてください。
フィンガ駆動部へ加わるモーメントの許容範囲
フィンガ駆動部へ加わるモーメントは、フィンガとワークの総質量および重心位置、さらには、把持点が関係しています。
下図は、フィンガ駆動部へ加わるモーメントを算出するために必要な値を示したものです。
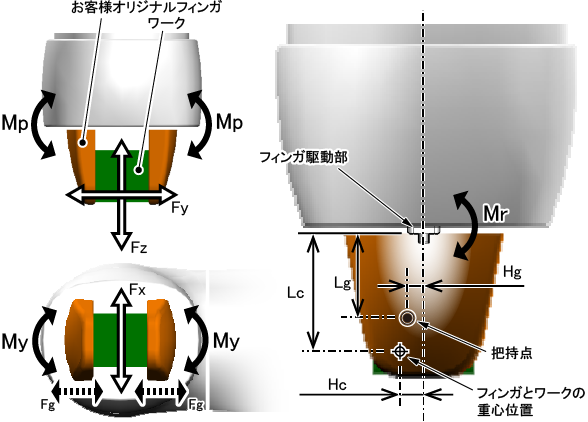
| Fz | フィンガに加わるZ方向の力 (N) |
|---|---|
| Fy | フィンガに加わるY方向の力 (N) |
| Fx | フィンガに加わるX方向の力 (N) |
| Fg | 把持するときに指定するCOBOTTA用電動グリッパの把持力 (N) |
| Lg | フィンガ取付け面から把持点までの距離 (mm) |
| Hg | フィンガ駆動部の中心から把持点までの距離 (mm) |
| Lc | フィンガ取付け面からフィンガとワークの重心位置までの距離 (mm) |
| Hg | フィンガ駆動部の中心からフィンガとワークの重心位置までの距離 (mm) |
| Mp | フィンガに加わるピッチングモーメント (N·mm) |
| My | フィンガに加わるヨーイングモーメント (N·mm) |
| Mr | フィンガに加わるローリングモーメント (N·mm) |
上図の、Mp、My、Mrが許容範囲内であるかを確認する必要があります。
また、上図の値から、フィンガ駆動部へ加わる等価荷重の合計 (以下 "Fz(total)")を算出し、Fz(total)が許容範囲内であるかを確認する必要があります。
Mp、My、MrおよびFz(total)の算出式及び、許容範囲は下記のとおりです。下記の許容範囲を超えないようにしてください。
| 式 | 最大許容値 |
|---|---|
| Mp=(13.0+Lc)×Fy+7.5×Fz+(13.0+Lg)×Fg×1.5 | 1600 (N·mm) |
| My=(13.5+Hc)×Fy+7.5×Fx+(13.5+Hg)×Fg×1.5 | 1300 (N·mm) |
| Mr=(13.5+Hc)×Fz+(13.0+Lc)×Fx | 2000 (N·mm) |
| Fz(total)=Fz+1.19×Fx+0.38×Mr+0.48×Mp+0.58×My | 770 (N) |
なお、上記許容値を超えないような把持点が、実際に、どれくらいの範囲にあるのかを示した図を後述の"把持点の範囲について"に掲載しております。そちらも参考にしてください。
フィンガの寸法図については、"フィンガの取付け寸法図"を参照してください。
把持点の範囲について
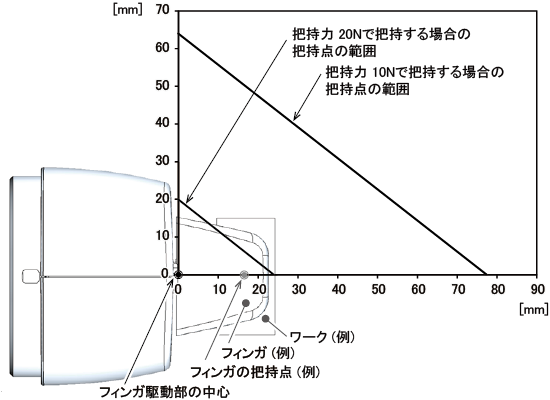
下図は、フィンガ駆動部の中心から把持点までの距離の範囲を示したものです。
上記4つの許容範囲を超えないようにするためには、把持点は下図の範囲内に位置させることが必要です。
実際には、上記4つの許容範囲を超えないことが重要ですので、下図は、把持点の位置を、フィンガ駆動部の中心からどれだけ離すことができるかを把握するための参考図としてご活用ください。
フィンガの総質量の許容範囲
フィンガが重すぎると、ワーク把持時の衝撃力が増加し、グリッパが破損する可能性があります。フィンガの総質量は、できる限り16gを超えないようにしてください。
ワークの幅の範囲
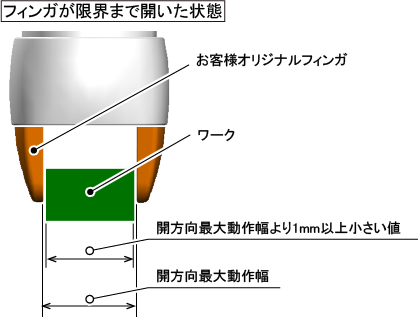
フィンガが限界まで開いたときのフィンガ間の距離を、開方向最大動作幅と呼びます。
ワークの幅(フィンガでつかむ部分の幅)は、上記の開方向最大動作幅より1mm以上小さい値である必要があります。
電動グリッパはワークの把持状態(把持したかどうか)を検出することができます。しかし、ワークの幅が開方向最大動作幅より1mm以上小さい値ではない場合、把持状態を正しく検出できない可能性があります。
フィンガを開いてワークの内側をつかむ場合は、上記とは逆です。
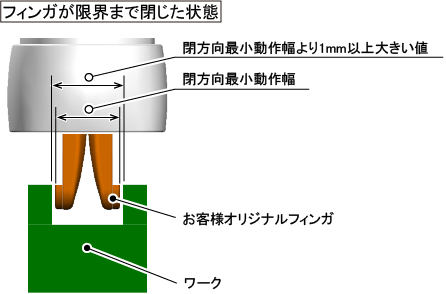
フィンガが限界まで閉じたときのフィンガ間の距離を、閉方向最小動作幅と呼びます。
ワークの幅(フィンガでつかむ部分の幅)は、上記の閉方向最小動作幅より1mm以上大きい値である必要があります。
ワークの幅が閉方向最小動作幅より1mm以上大きい値ではない場合、把持状態を正しく検出できない可能性があります。
ID : 7892