
ID : 4183
「アーム」メニュー
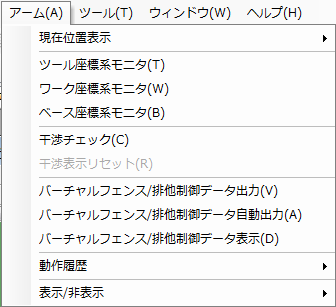
項目の説明
現在位置表示
「アーム3Dビュー」に現在のアームの位置を変数(P型、J型、T型、J-EX型)の値で表示します。また、その値をコピーすることができます。
ツール座標系モニタ
「アーム3Dビュー」に現在のツール番号と座標軸の表示をON/OFFします。
ワーク座標系モニタ
「アーム3Dビュー」に現在のワーク番号と座標軸の表示をON/OFFします。
ベース座標系モニタ
「アーム3Dビュー」に現在のベース座標軸の表示をON/OFFします。
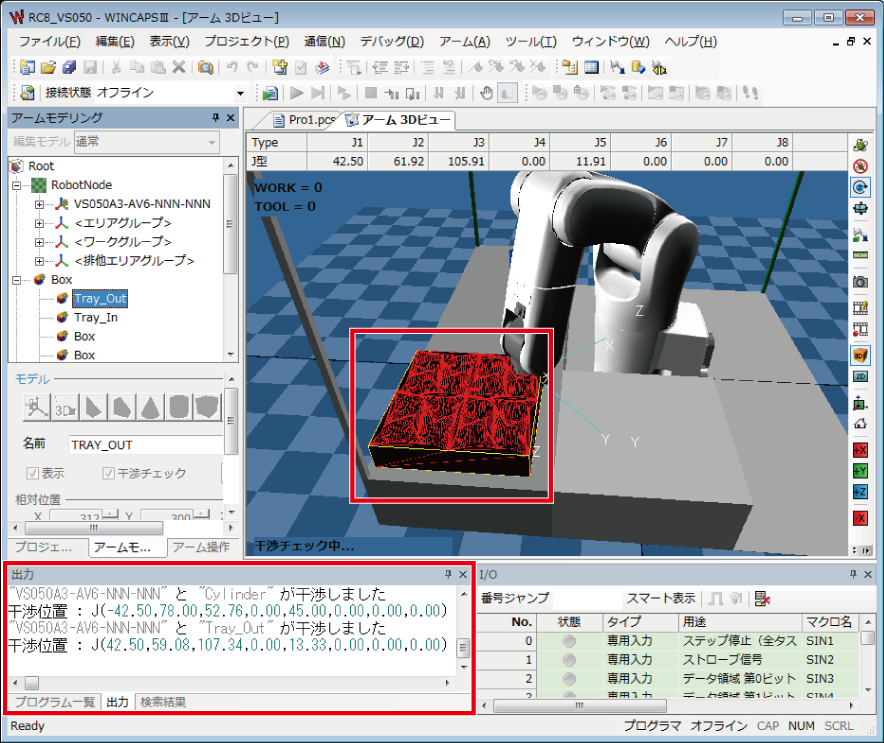
干渉チェック
干渉チェックをON/OFFします。
ON中に干渉を検出すると、アーム3Dビュー画面の干渉オブジェクトの色が反転し、出力画面に位置情報が表示されます。
また、バーチャルフェンス/排他制御での干渉は、監視モデルのワイヤーフレーム色が反転します。
干渉表示リセット
干渉検出の表示を元に戻します。
バーチャルフェンス/排他制御データ出力
バーチャルフェンスデータ、または排他制御データをプロジェクトフォルダに出力します。
バーチャルフェンス/排他制御データ自動出力
プロジェクトを保存する時と、COBOTTAにデータを送信する時にバーチャルフェンスデータ、または排他制御データを自動的に出力します。
バーチャルフェンス/排他制御データ表示
バーチャルフェンスデータ、または排他制御のデータをアーム3D画面に表示します。
動作履歴
ロボットが動作した軌跡の表示を設定します。
表示/非表示
「アーム3Dビュー」に表示する床、アーム、ツール、ワーク、エリア、障害物の表示/非表示を切り替えます。
ID : 4183