
ID : 4080
アーム補助機能の表示・設定
操作経路:[F2 アーム] - [F6 補助機能]
ロボットを動かす上での様々な使用条件の設定、 "ツール座標" や "ワーク座標" 、 "エリア" 、 "経路点" の設定などを行うメニューが表示されます。
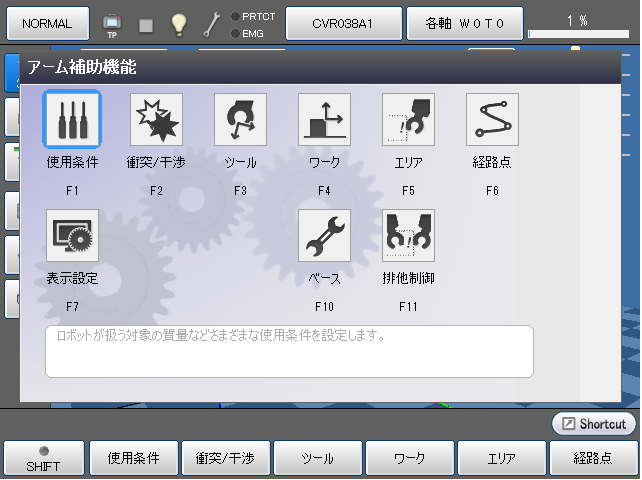
[F6 補助機能]を押すと、次のような[アーム補助機能]ウィンドウが表示されます。
| 使用可能なファンクションキー | |
|---|---|
| [F1 使用条件] |
[使用条件]ウィンドウが表示されます。 ロボットの先端負荷質量をはじめ、ロボットを動かす上での様々な使用条件を設定します。 |
| [F2 衝突/干渉] (Ver.2.5.*以降) |
[衝突/干渉]ウィンドウが表示されます。 "衝突検出" や "バーチャルフェンス" の設定を行います。 |
| [F3 ツール] |
[ツール設定]ウィンドウが表示されます。 |
| [F4 ワーク] |
[ワーク設定]ウィンドウが表示されます。 "ワーク座標系" の設定を行います。 |
| [F5 エリア] (Ver.2.5.*以降) |
[エリア設定]ウィンドウが表示されます。 "エリア" の領域設定を行います。 |
| [F6 経路点] |
[経路点設定]ウィンドウが表示されます。 経路点の設定を行います。 |
| [F7 表示設定] | [アーム]ウィンドウの表示項目の設定を行います。 |
| [F10 ベース] |
[ベース設定]ウィンドウが表示されます。 このメニューは、バーチャルフェンス機能または排他制御機能のライセンスを登録すると、表示されます。 |
| [F11 排他制御] (Ver.2.7.*以降) |
[排他制御]ウィンドウが表示されます。 このメニューは、排他制御機能のライセンスを登録すると、表示されます。 |
ID : 4080