
ID : 4072
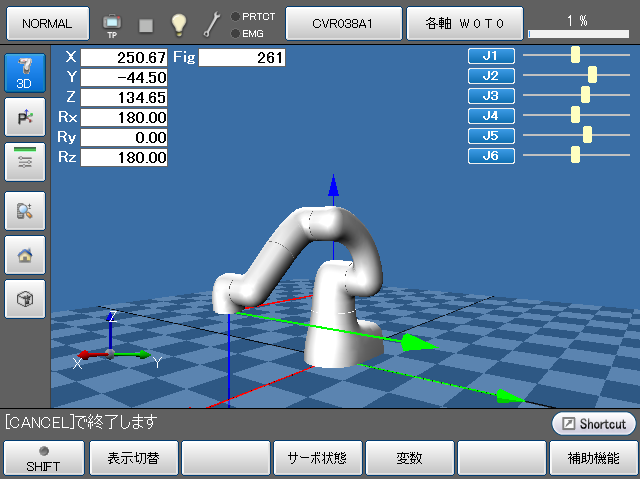
ロボットの現在位置情報と3D画像の表示
操作経路:基本画面 - [F2アーム]
ロボットの現在位置情報を表示します。
| ファンクションキー以外のキー | |
|---|---|
 |
マシンロック時にロボットの3D画像を表示します。 3Dボタンが押されている時は、ボタンが青色に点灯します。 |
 |
ロボットの現在位置情報の表示方法を変更します。 選択できる表示は、「P型表示」、「J型表示」、「T型表示」、「表示なし」の4種類で、ボタンを押すごとに切り替わっていきます。 |
 |
各軸の位置情報をバー表示します。 ボタンを押すごとに表示する、しないを切り替えられます。 |
 |
COBOTTAでは使用しません。 |
 |
3D画像の視点を変更します。 ボタンを押すごとにデフォルト→正面→上→右側面→デフォルトの順に表示されます。 |
 |
3D画像の視点を変更します。 ボタンを押すとロボット全体が見えるように視点を移動します。 |
| 使用可能なファンクションキー | |
|---|---|
| [F1 表示切替] |
ロボットの現在位置情報の表示方法を変更します。 選択できる表示は、「P型表示」、「J型表示」、「T型表示」、「表示なし」の4種類で、ボタンを押すごとに切り替わっていきます。 |
| [F3 サーボ状態] |
各軸のサーボの状態を表示します。 また、制御ログやサーボログの取得、各軸の予想負荷率を表示することができます。 |
| [F4 変数] | 「変数画面」を表示します。 |
| [F6 補助機能] |
[アーム補助機能]ウィンドウが表示されます。 アームにかかわる設定の確認・変更を行います。 |
| [F12 保守] | 各軸の設定にかかわるメニューが表示されます。 |
ID : 4072
- このページに関連する情報
- サーボの状態表示
- 変数画面の表示・変更
- アーム補助機能の表示・設定
- アーム保守機能の表示・設定