
ID : 10892
地面设置、悬挂设定
通过地面设置使用机器人时,以及通过悬挂、壁挂方式、在倾斜面(任意角度)使用机器人时,最佳运行条件有所不同。在地面设置、悬挂设定中,设定成与实际的机器人设置状况一致。
安装条件
出厂时设定为“地面设置”。
此外,根据机器人的机型不同,可设置的条件会有所不同。请参照下表。
| 地面设置 | 悬挂 | 壁挂(下) | 壁挂(左) | 壁挂(右) | 任意角度 | |
|---|---|---|---|---|---|---|
| VMB-2515 | ● | ● | ● | ● | ● | ● |
| VMB-2518 | ● | ● | ● | ● | ● | ● |
| VLA-4025 | ● | ● | - | - | - | ● |
| VLA-6022 | ● | ● | - | - | - | ● |
设定倾斜角度时,请将机器人前倾的旋转方向(机器人坐标系的Ry)设定值设定成正的倾斜角度。
- VMB系列机器人时
- VMB系列机器人的可设置角度为0°~180°。
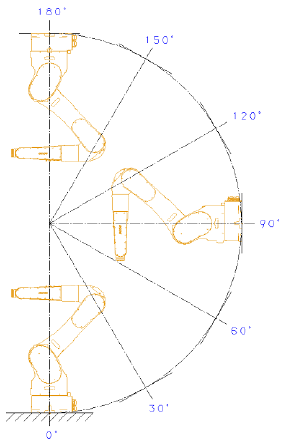
- VLA系列机器人时
- VLA系列机器人的可设置角度为0°~45°及135°~180°。
按机器人在左右方向旋转(机器人坐标系的Rx)设定值使用时,请咨询本公司营业部门。
设定方法
下面以将VMB系列机器人设置在倾斜面(任意角度)时的设定方法为例进行说明。
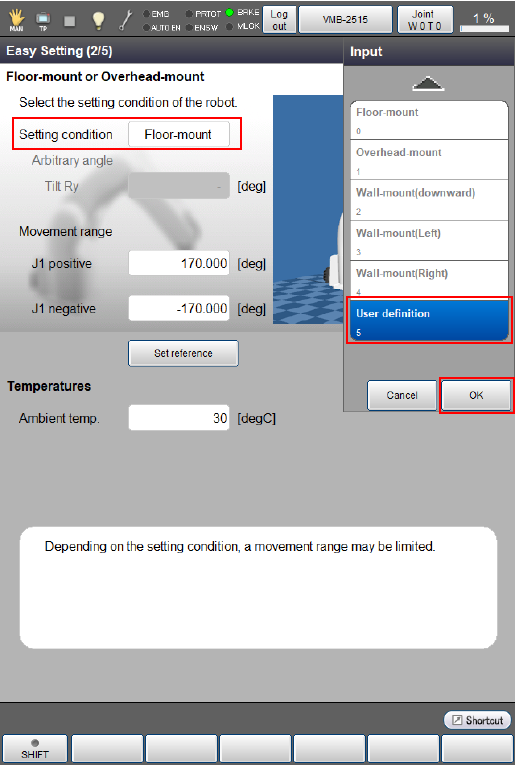
1
设置条件选择“任意角度”,按压[OK]。
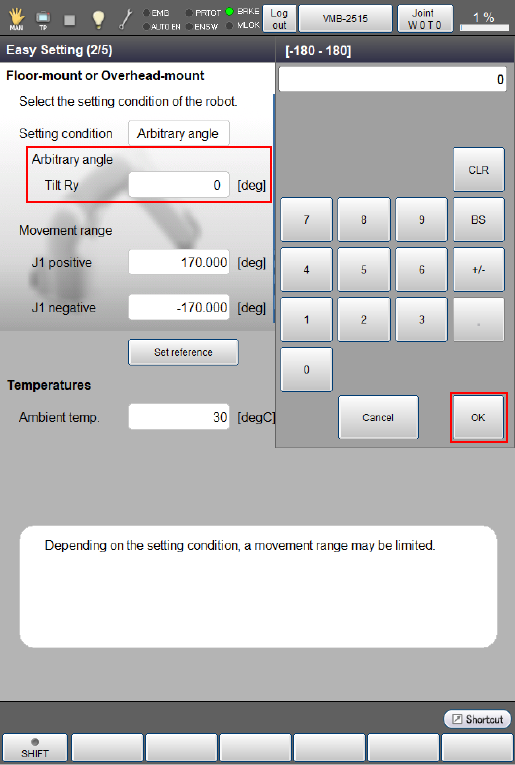
2
输入任意角度,按压[OK]。
任意角度只能在设置条件为“任意角度”时设定。“地面设置”、“悬挂”、“壁挂”时不需要。
3
在设置条件中设定任意角度后,“动作范围”信息即会被更新。
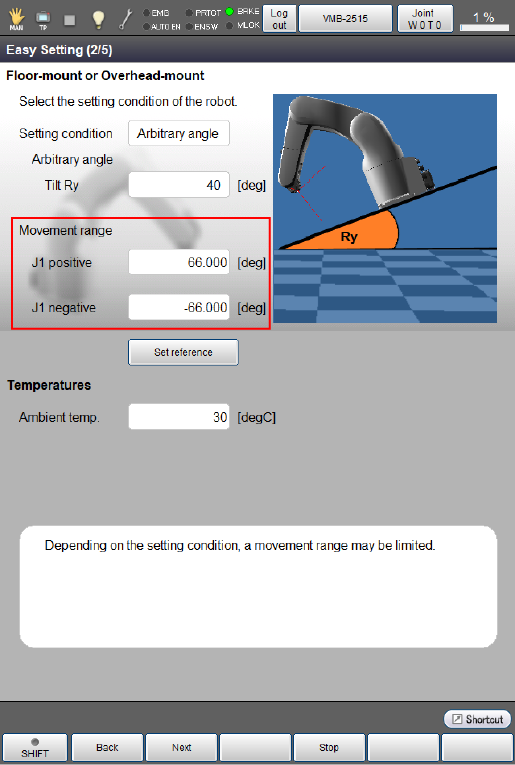
在设置条件中选择“壁挂”、“倾斜角度”时,1轴的动作范围会受限。
为了安全,请在机器人的1轴上安装可变机械限动器。可预防破损。
安装时的动作范围请参考“动作范围”信息。
在VLA系列机器人设定20°以上的倾斜角度时,如果从WINCAPSIII发送默认的用户参数,在发送时将会发生错误。
ID : 10892