
ID : 9645
负载推定功能
所谓负载推断功能,就是使机器人执行特定的动作,推断前端负载的质量和重心的功能。在简单设定的“前端负载质量”和“前端负载重心”的输入时,可使用该功能。
测量结果可能与实际值不同。通过CAD、计算等弄清前端负载的正确值时,请不要使用负载推断功能,使用该值。
测量时的动作概要
根据测量对象,机器人通过1~3种动作路径动作。
由于在各动作路径执行低速动作和高速动作,请确认低速动作时是否与设备干涉。
低速动作时,按照高速动作时的10%的速度、加速度动作。
在测量动作中,在法兰(机械界面)及TCP点有时速度会超过250mm/s。
测量时的最大移动量
测量时机器人自动动作。
朝[+]方向移动后,返回原来的位置。
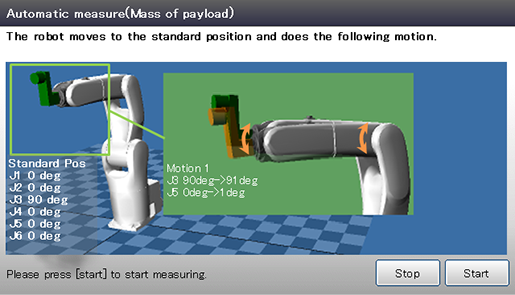
前端负载质量
| 动作轴 | 动作1 | |
|---|---|---|
| 动作开始位置 | 移动量 | |
| J3 | 90° | 1° |
| J5 | 0° | 1° |
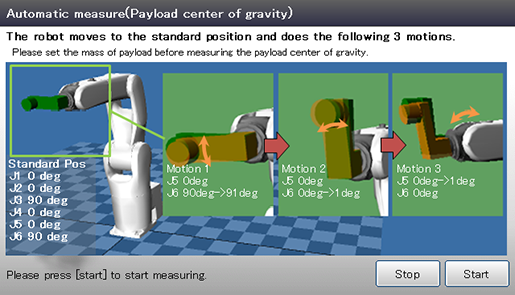
负载重心位置
| 动作轴 | 动作1 | 动作2 | 动作3 | |||
|---|---|---|---|---|---|---|
| 动作开始位置 | 移动量 | 动作开始位置 | 移动量 | 动作开始位置 | 移动量 | |
| J5 | 0° | - | 0° | - | 0° | 1° |
| J6 | 90° | 1° | 0° | 1° | 0° | - |
操作方法
各测量的操作方法请参照以下内容。
- 进行自动测量时,请按照前端负载质量→负载重心位置的顺序测量。如果顺序不对,可能得不到正确的测量值。
- 知道前端负载质量、重心位置的计算值时,请设定该值。没有必要进行自动测量。
ID : 9645
- 本页相关信息
- 前端负载质量自动测量
- 负载重心位置自动测量