
ID : 10854
连接方法
基本思路
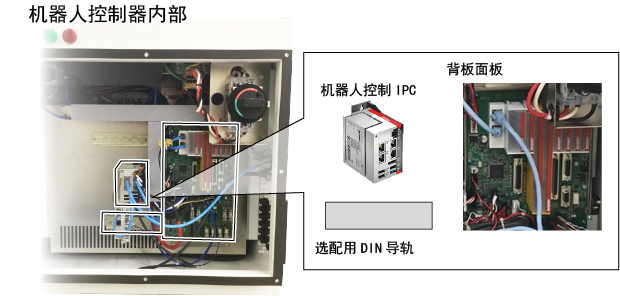
无论连接哪个I/O选项,都需要EtherCAT耦合器端子。
由于机器人控制器内部有选件用DIN导轨,因此在那里安装EtherCAT耦合器端子。
安装EtherCAT耦合器端子后,如下图连接EtherCAT电缆与背板电源线束(单一)。
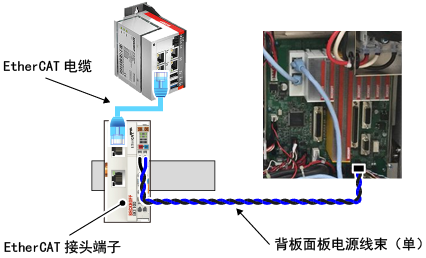
订购机器人时如果指定了EtherCAT耦合器端子的组装选项,则会在至上图为止的连接完成的状态下出货。
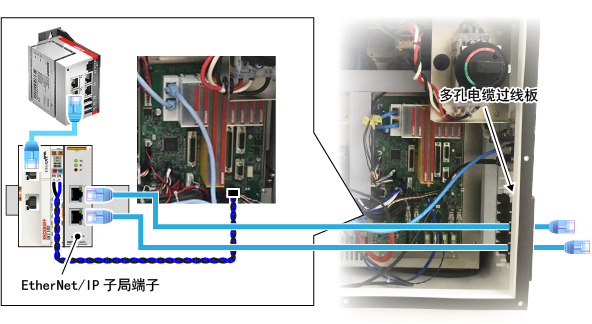
之后将任意的I/O选项连接在EtherCAT耦合器端子右侧。下图为连接EtherNet/IP子局端子时的示例。
连接EtherNet/IP子局端子的电缆通过多孔电缆过线板引出至机器人控制器外部。
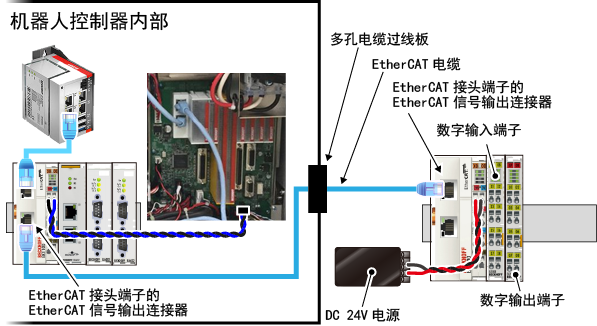
无法内置在机器人控制器中时
I/O选项的数量超过可以内置在机器人控制器中的数量时
下图为无法内置数字输入端子与数字输出端子时的示例。
另行准备EtherCAT耦合器端子,如下图进行连接,用于无法内置的I/O选项。
ID : 10854