
ID : 10831
CALSET
CALSET的定义
将控制器识别的位置信息和机器人本体的实际位置关系进行校正称作CALSET。CALSET中,各轴存在预先规定的可固定位置,创建该位置和编码器值相对应的数据(CALSET值)。此时,固定轴的位置称作CALSET位置,记录CALSET位置的度数的数据为RANG值。
每台机器人的CALSET数据都不相同。
更换电机时需要进行CALSET作业。
CALSET作业中分为“CALSET”与“CALSET数据复原”。
电机更换后请执行“CALSET”,其他的情形请执行“CALSET数据复原”。
由用户管理机器人的CALSET数据。参考“关于项目的备份”,定期对CALSET数据进行备份。
| 轴 | CALSET位置 | |
|---|---|---|
| J1 | 0° | 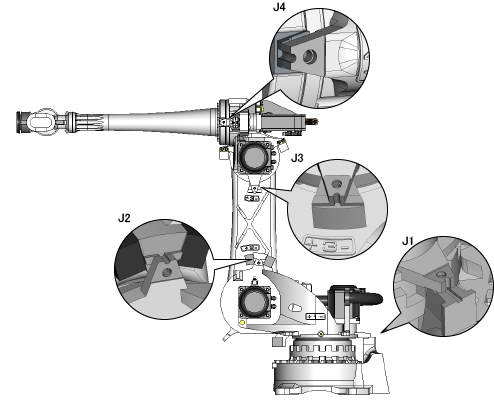 |
| J2 | 0° | |
| J3 | -90° | |
| J4 | 0° | |
| J5 | 0° | 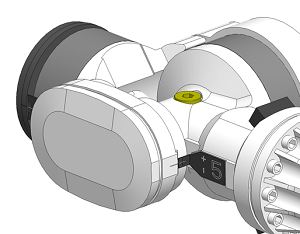 |
| J6 | 0° |
|
CALSET的步骤
如果在希望进行CALSET的轴切口处安装保护零部件,请将保护零件拆下。
对5轴进行CALSET时,需要将4轴对准CALSET位置。
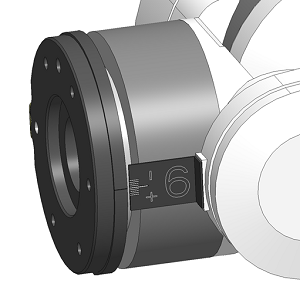
对6轴进行CALSET时,需要将4轴和5轴对准CALSET位置。
1
解除要执行CALSET的轴的制动器,并置于CALSET位置。
2
使用智能TP进行CALSET。
操作方法请参照智能TP操作指南的“CALSET操作”。
至此,CALSET完成。
实施CALSET后,安装拆下的保护零部件。
ID : 10831
- 本页相关信息
- 使用工具的CALSET