
ID : 10776
通过MP进行设置(CALSET)
VL初期设定数据的接收处理完成,重启机器人控制器后,按顺序进行VLA的设置(CALSET和动作确认)。
首先按照以下步骤进行CALSET。
如果在启动时发生以下错误,可能是将错误的VL初期设定数据发送到控制器,或者是控制器中设定的机器人型号和连接的机器人型号不同。请确认机器人型号和序列号,从WINCAPSIII重新发送VL初期设定数据。如果仍然没有解决,请联系本公司售后服务。
- 0x85500392 : VL初始设定数据与编码器的序列号不一致
- 0x855003A7 : 向控制器写入VL初始设定数据失败
1
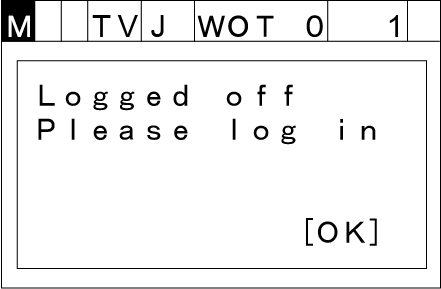
重启机器人控制器后,显示登录画面。
以初始帐户的“Administrator”登录。密码为“1234”。
如果更改初始帐户,请用具有维护或风险评估权限的用户登录。设置需要用户等级为维护以上才可以。
2
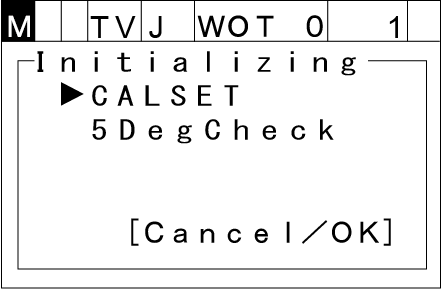
显示VLA设置(CALSET、动作确认)画面。
选择CALSET,按压[OK]。
3
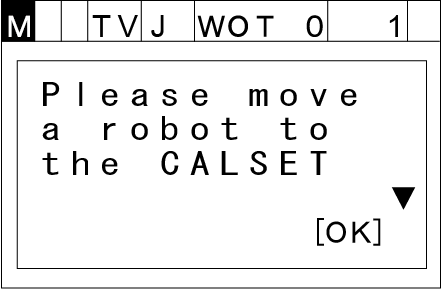
显示CALSET的说明画面时请按[OK]。
4
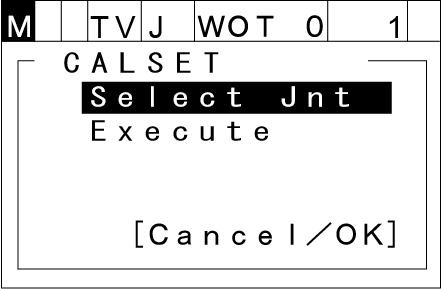
显示CALSET画面。
5
通过手动操作将机器人移到下图所示的CALSET位置。
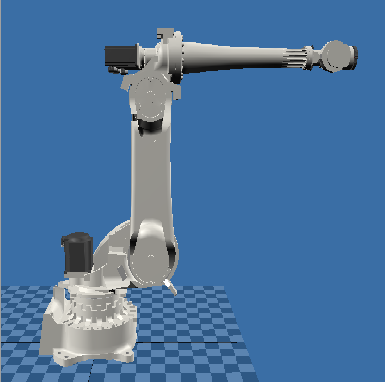
- CALSET时的轴位置
1轴 2轴 3轴 4轴 5轴 6轴 0° 0° -90° 0° 0° 0°
如果在手动操作中频发位置偏差过大,请联系售后服务。
- 目视使各轴的可动基准切口和固定基准切口一致。需要使用定位传送用千分尺。
- 如果是自动模式,需要变更成手动模式。
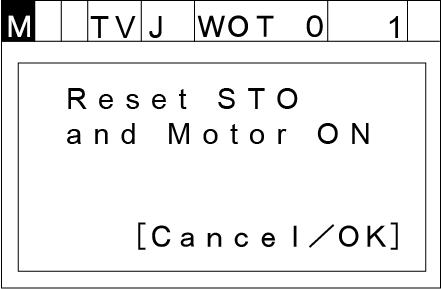
- 电机ON时按下允许开关,显示以下画面时按下[OK]。
6
选择“Select Jnt”,按压[OK]。
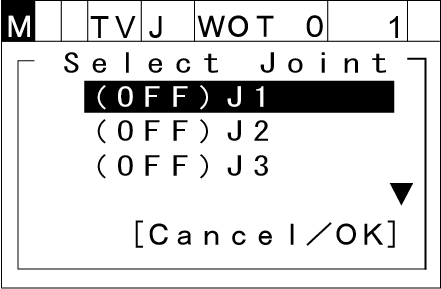
7
显示CALSET对象轴的选择画面时再选择J1,然后再按[OK]。
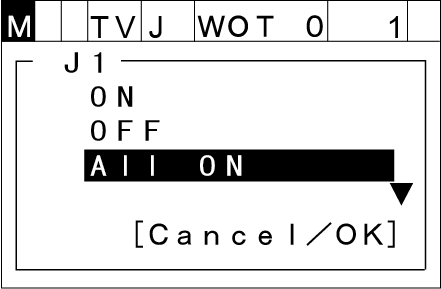
8
显示将对象轴进行CALSET(ON)或不进行CALSET(OFF)的设定画面。
选择“ALL ON”(将所有轴都设为ON),按下[OK]。
9
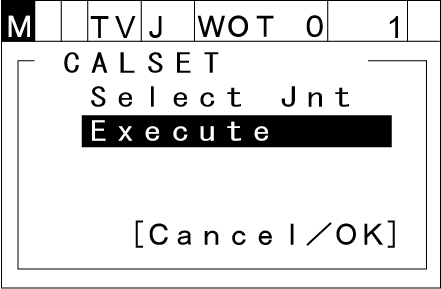
返回CALSET的选择画面,选择“Execute”,按下[OK]。
10
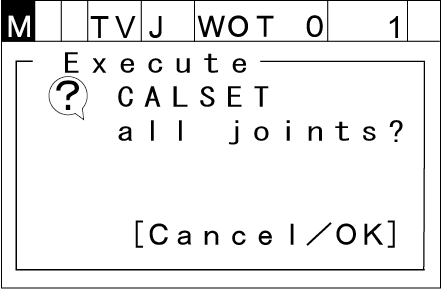
显示确认是否执行CALSET的画面后,按压[OK]。
11
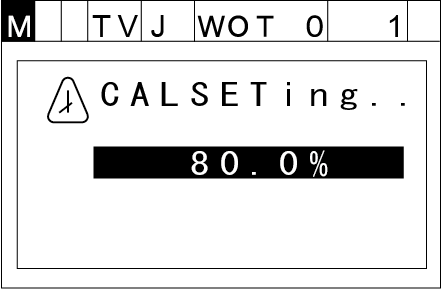
在CALSET执行中显示进度画面。请等待变为100%,CALSET完成。
12
CALSET完成后,显示成功画面,然后按压[OK]。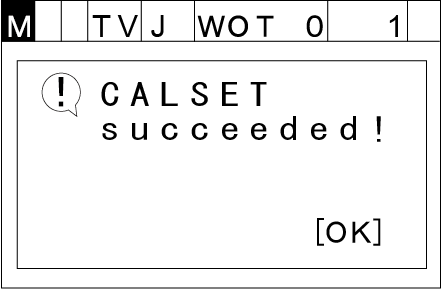
至此,CALSET结束。
ID : 10776